2.2 内存访问优化
内存访问效率是 CUDA Kernel 性能最大的杠杆
内存访问效率是 CUDA Kernel 性能最大的杠杆。本文深入讲解合并访问(Coalesced Access)的原理与判定方法、共享内存 Bank Conflict 的成因与 Padding 解决方案,以及向量化加载(float4/int4)提升带宽利用率的实战技巧。
📑 目录
1. 为什么内存访问是性能瓶颈
GPU 像一个巨大的工厂——车间里有几千台机器(计算核心)同时运转,但原料仓库(显存)只有一条搬运通道(内存总线)。无论工厂的机器多快,如果搬运通道被堵住,整条生产线都只能等着。
做一道算术:A100 的峰值计算能力为 312 TFLOPS(FP16 Tensor Core),而 HBM2e 带宽约 2 TB/s。对于一个简单的向量加法 c[i] = a[i] + b[i]:
只有峰值算力的 0.05%。因此,优化内存访问模式往往比优化计算逻辑更能提升性能。
1.1 Roofline 模型快速回顾
Roofline 模型将 Kernel 分为两类:
- Memory-Bound:受带宽限制,优化方向是减少内存访问、提高访问效率
- Compute-Bound:受计算限制,优化方向是提高计算并行度
大多数 Kernel(特别是 Elementwise、归约、矩阵转置等)都是 Memory-Bound。对它们而言,合并访问和高效的内存使用模式才是性能关键。
2. 全局内存与合并访问
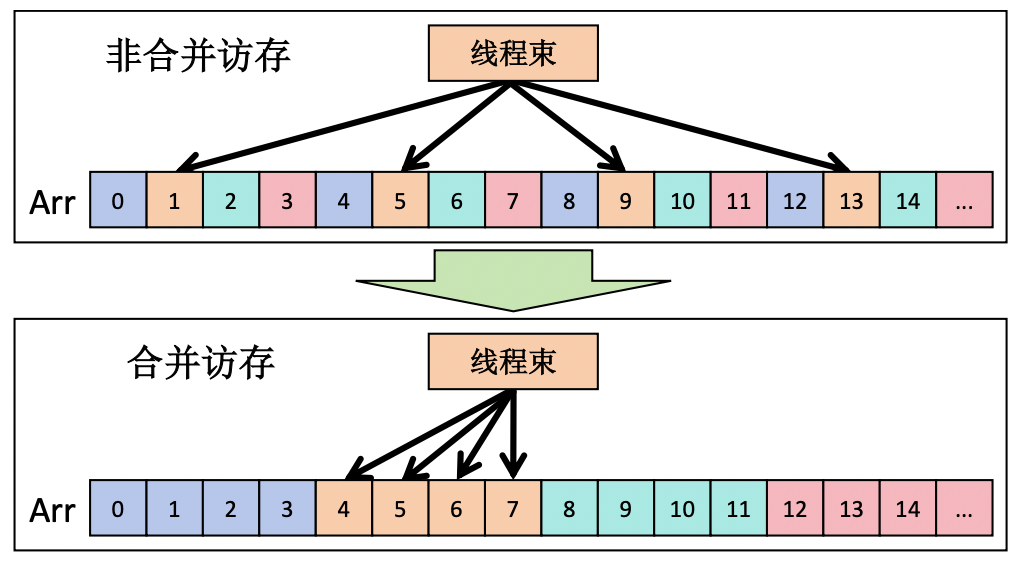
2.1 合并访问的原理
全局内存的访问以 Warp 为单位进行事务(transaction)合并。当一个 Warp 的 32 个线程同时发起内存读写时,硬件会尝试将这些请求合并为最少的内存事务。
每个内存事务的粒度为 32 Bytes(一个 cache line sector)。L1 cache line 为 128 Bytes,由 4 个 32B sector 组成。
💡 提示:合并访问的核心原则很简单——让 Warp 内的连续线程访问连续的内存地址。
2.2 合并 vs 非合并的性能差异
// ✅ 合并访问:连续线程访问连续地址
// 1个 Warp 的 32 线程访问连续 128B,恰好落在 1 条 cache line 内
__global__ void coalesced_read(float* data, float* out, int N) {
int tid = threadIdx.x + blockIdx.x * blockDim.x;
if (tid < N) {
out[tid] = data[tid]; // data[0], data[1], ..., data[31] 连续
}
}
// ❌ 非合并(跳跃访问):连续线程访问间隔地址
// stride=32 时,每个线程的地址相差 128B,需 32 个事务
__global__ void strided_read(float* data, float* out, int N, int stride) {
int tid = threadIdx.x + blockIdx.x * blockDim.x;
if (tid < N) {
out[tid] = data[tid * stride]; // data[0], data[32], data[64], ...
}
}
性能对比(A100,读取 1GB 数据):
| 📊 访问模式 | 内存事务数 | 有效带宽利用率 | 相对耗时 |
|---|---|---|---|
| 连续对齐(stride=1) | 1x | ~95% | 1x |
| stride=2 | 2x | ~50% | 2x |
| stride=4 | 4x | ~25% | 4x |
| stride=32 | 32x | ~3% | 32x |
| 完全随机 | 32x | ~3% | 32x |
2.3 对齐要求
除了连续性,对齐也很重要:
// ✅ 对齐访问:起始地址是 128B 的倍数
float* aligned_ptr = data; // cudaMalloc 保证 256B 对齐
out[tid] = aligned_ptr[tid];
// ⚠️ 偏移访问:起始地址未对齐,可能多出一个事务
out[tid] = data[tid + 1]; // 起始地址偏移 4B,不再 128B 对齐
好消息是 cudaMalloc 分配的内存始终 256 Bytes 对齐,所以只要从头开始连续访问通常不会有对齐问题。需要注意的是手动指针偏移的情况。
2.4 结构体数组 vs 数组结构体
这是经典的 AoS vs SoA 问题:
// ❌ AoS(Array of Structures):不利于合并访问
struct Particle {
float x, y, z, w;
};
Particle particles[N];
// 访问所有 x:particles[0].x, particles[1].x, ...
// 地址跳跃:0, 16, 32, 48, ... (stride=4)
// ✅ SoA(Structure of Arrays):利于合并访问
struct ParticlesSoA {
float x[N], y[N], z[N], w[N];
};
ParticlesSoA particles;
// 访问所有 x:particles.x[0], particles.x[1], ...
// 地址连续:0, 4, 8, 12, ... (stride=1)
📌 关键点:在 GPU 编程中,SoA 几乎总是优于 AoS,因为 GPU 的 Warp 并行模式天然适合连续线程访问连续字段。
2.5 二维数组的行列访问
// 二维数组按行存储(Row-Major),element[row][col] 在地址 row*cols+col
// ✅ 行方向遍历:连续线程访问同一行的连续列
int col = threadIdx.x + blockIdx.x * blockDim.x;
int row = blockIdx.y;
float val = matrix[row * cols + col]; // 合并
// ❌ 列方向遍历:连续线程访问同一列的连续行
int row2 = threadIdx.x + blockIdx.x * blockDim.x;
int col2 = blockIdx.y;
float val2 = matrix[row2 * cols + col2]; // stride = cols,极差
3. 共享内存与 Bank Conflict
3.1 共享内存的 Bank 结构
共享内存被划分为 32 个 Bank(与 Warp 大小一致),每个 Bank 宽 4 Bytes(32 bits)。连续的 4 Byte 字被分配到连续的 Bank:
地址 0~3: Bank 0
地址 4~7: Bank 1
地址 8~11: Bank 2
...
地址 124~127: Bank 31
地址 128~131: Bank 0 (循环)
...
每个时钟周期,每个 Bank 只能服务一次读或写请求。如果同一个 Warp 中有多个线程访问同一个 Bank 的不同地址,这些访问必须串行化——这就是 Bank Conflict。
3.2 Bank Conflict 的类型与代价
| 📊 冲突类型 | 含义 | 性能影响 |
|---|---|---|
| 无冲突(No Conflict) | 32 线程访问 32 个不同 Bank | 1 个周期完成 |
| 2-way Conflict | 2 个线程访问同一 Bank | 2 个周期(串行化) |
| N-way Conflict | N 个线程访问同一 Bank | N 个周期 |
| 广播(Broadcast) | 多个线程访问同一 Bank 的同一地址 | 1 个周期(免费) |
⚠️ 注意:广播是特殊情况——如果多个线程读的是同一个地址(完全相同),硬件会广播该值给所有请求线程,不算冲突。只有”同一 Bank,不同地址”才会产生冲突。
3.3 经典冲突场景:矩阵转置
// 朴素矩阵转置(Naive Transpose)
__shared__ float tile[32][32];
// 写入时:连续线程写同一行的不同列 → 无冲突
tile[threadIdx.y][threadIdx.x] = input[gy * N + gx];
// 读取时:连续线程读同一列的不同行
output[gx * N + gy] = tile[threadIdx.x][threadIdx.y];
// threadIdx.x=0 → tile[0][ty], 地址= (0*32+ty)*4 = ty*4 → Bank = ty%32
// threadIdx.x=1 → tile[1][ty], 地址= (1*32+ty)*4 → Bank = (32+ty)%32 = ty%32
// threadIdx.x=2 → tile[2][ty], 地址= (2*32+ty)*4 → Bank = (64+ty)%32 = ty%32
// 所有线程的 Bank 相同(= ty%32)→ 32-way Bank Conflict!
3.4 解决方案一:Padding
在共享内存声明中额外加一列,打破 32 的倍数对齐:
// ✅ 添加 1 列 Padding
__shared__ float tile[32][32 + 1]; // 33 列
// 原本 tile[row][col] 地址 = (row * 32 + col) * 4
// 现在 tile[row][col] 地址 = (row * 33 + col) * 4
// Bank = (row * 33 + col) % 32
// 读取 tile[threadIdx.x][ty]:
// threadIdx.x=0 → Bank = (0*33+ty)%32 = ty%32
// threadIdx.x=1 → Bank = (1*33+ty)%32 = (33+ty)%32 = (1+ty)%32
// threadIdx.x=2 → Bank = (2*33+ty)%32 = (66+ty)%32 = (2+ty)%32
// 每个线程访问不同的 Bank → 无冲突!
Padding 的代价是每行多浪费 4 Bytes 共享内存,但带来的性能提升通常远超这点开销。
3.5 解决方案二:Swizzle(高级)
对于某些访问模式,可以使用地址变换(Swizzle)来避免冲突:
// Swizzle 思路:将线性索引通过 XOR 变换打乱 Bank 分布
__device__ int swizzle_index(int row, int col) {
return row * 32 + (col ^ row); // XOR 变换
}
// 写入
tile[row][col ^ row] = input_val;
// 读取
float val = tile[col][row ^ col];
Swizzle 不浪费额外空间,但增加了索引计算的复杂度。在高性能 GEMM 实现(如 CUTLASS)中广泛使用。
3.6 如何检测 Bank Conflict
使用 Nsight Compute 观察共享内存指标:
l1tex__data_bank_conflicts_pipe_lsu_mem_shared_op_ld # 加载冲突
l1tex__data_bank_conflicts_pipe_lsu_mem_shared_op_st # 存储冲突
如果这两个计数器不为零,说明存在 Bank Conflict,需要检查共享内存的访问模式。
4. 向量化加载
4.1 什么是向量化加载
向量化加载指的是用一条指令读取多个连续元素(如 float4 一次读 4 个 float,16 Bytes)。好处是:
- 减少指令数:4 次
LDG.32→ 1 次LDG.128 - 提高带宽利用率:单次事务传输更多有效数据
- 减少调度开销:更少的内存指令排队
4.2 常用向量类型
| 📊 类型 | 大小 | 等价 |
|---|---|---|
float2 | 8 Bytes | 2 个 float |
float4 | 16 Bytes | 4 个 float |
int4 | 16 Bytes | 4 个 int |
double2 | 16 Bytes | 2 个 double |
💡 提示:GPU 一条 cache line 为 128 Bytes。一个 Warp 的 32 个线程每人加载一个 float4(16B)= 512B,需要请求 4 条 cache line。对比每人加载一个 float(4B)= 128B 只需 1 条 cache line。虽然 cache line 请求数增多了,但每条加载指令处理的数据量是 4 倍,总指令数减少 75%。
4.3 基本用法
// 标量版本:每个线程加载 1 个 float
__global__ void scalar_copy(float* dst, float* src, int N) {
int tid = threadIdx.x + blockIdx.x * blockDim.x;
if (tid < N) {
dst[tid] = src[tid];
}
}
// 向量化版本:每个线程加载 4 个 float
__global__ void vectorized_copy(float* dst, float* src, int N) {
int tid = threadIdx.x + blockIdx.x * blockDim.x;
int idx = tid * 4; // 每个线程负责4个元素
if (idx + 3 < N) {
// 将 float* 强制转换为 float4*,一条指令读取 16B
float4 val = reinterpret_cast<float4*>(src)[tid];
reinterpret_cast<float4*>(dst)[tid] = val;
}
}
4.4 对齐要求
向量化加载有严格的对齐要求:
// float4 要求 16B 对齐
// cudaMalloc 分配的地址是 256B 对齐的 → 满足
// 但如果有偏移,需要特殊处理
float* base = ...; // 256B 对齐
float* offset_ptr = base + 3; // 偏移 12B,不满足 16B 对齐
// ✅ 安全做法:先标量处理头部未对齐部分,再向量化处理主体
__global__ void safe_vectorized(float* data, int offset, int N) {
// 处理头部未对齐的元素
int align_offset = (4 - (offset % 4)) % 4;
// ... 标量处理前 align_offset 个元素
// 主体向量化处理
float4* aligned_ptr = reinterpret_cast<float4*>(data + offset + align_offset);
// ...
}
4.5 实用模式:向量化归约
__global__ void vectorized_sum(float* input, float* output, int N) {
int tid = threadIdx.x + blockIdx.x * blockDim.x;
int stride = blockDim.x * gridDim.x;
float sum = 0.0f;
// 每次迭代处理4个元素
int vec_N = N / 4;
float4* vec_input = reinterpret_cast<float4*>(input);
for (int i = tid; i < vec_N; i += stride) {
float4 val = vec_input[i];
sum += val.x + val.y + val.z + val.w;
}
// 处理尾部不足4个的元素
int tail_start = vec_N * 4;
for (int i = tail_start + tid; i < N; i += stride) {
sum += input[i];
}
// 后续做 Block 归约...
output[blockIdx.x] = sum; // 简化,实际需要归约
}
4.6 何时使用向量化加载
| ✅ 适合场景 | ❌ 不适合场景 |
|---|---|
| Elementwise 操作(加减乘除) | 复杂的索引模式(gather/scatter) |
| 大规模数据拷贝/初始化 | 数据量不是 4 的倍数且无法处理尾部 |
| 带宽受限的 Kernel | 计算密集型 Kernel(瓶颈不在访存) |
| 数据地址可保证对齐 | 起始地址无法对齐 |
5. 内存访问优化实战
5.1 案例:矩阵转置优化
矩阵转置是内存访问优化的经典教科书案例,因为它不涉及任何计算,性能完全取决于内存访问效率。
朴素版本:
__global__ void transpose_naive(float* out, float* in, int width, int height) {
int col = threadIdx.x + blockIdx.x * blockDim.x;
int row = threadIdx.y + blockIdx.y * blockDim.y;
if (col < width && row < height) {
out[col * height + row] = in[row * width + col];
// 读取:合并(连续线程访问连续列)
// 写入:不合并(stride = height)
}
}
共享内存优化版本:
// 每个线程处理 TILE_DIM / BLOCK_ROWS 个元素
#define TILE_DIM 32
#define BLOCK_ROWS 8
__global__ void transpose_shared(float* out, float* in, int width, int height) {
__shared__ float tile[TILE_DIM][TILE_DIM + 1]; // +1 Padding 消除 Bank Conflict
int x = blockIdx.x * TILE_DIM + threadIdx.x;
int y = blockIdx.y * TILE_DIM + threadIdx.y;
// 合并读取:每个 warp 读取连续元素
for (int j = 0; j < TILE_DIM; j += BLOCK_ROWS) {
if (x < width && (y + j) < height) {
tile[threadIdx.y + j][threadIdx.x] = in[(y + j) * width + x];
}
}
__syncthreads();
// 合并写入:转置后的索引,连续线程写连续地址
x = blockIdx.y * TILE_DIM + threadIdx.x;
y = blockIdx.x * TILE_DIM + threadIdx.y;
for (int j = 0; j < TILE_DIM; j += BLOCK_ROWS) {
if (x < height && (y + j) < width) {
out[(y + j) * height + x] = tile[threadIdx.x][threadIdx.y + j];
}
}
}
// 调用方式:
// dim3 block(TILE_DIM, BLOCK_ROWS);
// dim3 grid((width + TILE_DIM - 1) / TILE_DIM, (height + TILE_DIM - 1) / TILE_DIM);
核心思路:用共享内存做”中转站”,将全局内存的非合并写入转化为共享内存的列读取(通过 Padding 消除 Bank Conflict),再以合并方式写出。
5.2 案例:归约操作中的内存优化
// ❌ 朴素归约:交错访问导致 Bank Conflict 和低带宽利用
__global__ void reduce_interleaved(float* input, float* output, int N) {
int tid = threadIdx.x;
int idx = blockIdx.x * blockDim.x + tid;
__shared__ float sdata[256];
sdata[tid] = (idx < N) ? input[idx] : 0.0f;
__syncthreads();
for (int s = 1; s < blockDim.x; s *= 2) {
if (tid % (2 * s) == 0) {
sdata[tid] += sdata[tid + s];
}
__syncthreads();
}
if (tid == 0) output[blockIdx.x] = sdata[0];
}
// ✅ 优化归约:连续线程操作连续地址
__global__ void reduce_sequential(float* input, float* output, int N) {
int tid = threadIdx.x;
int idx = blockIdx.x * blockDim.x + tid;
__shared__ float sdata[256];
sdata[tid] = (idx < N) ? input[idx] : 0.0f;
__syncthreads();
for (int s = blockDim.x / 2; s > 0; s >>= 1) {
if (tid < s) {
sdata[tid] += sdata[tid + s];
}
__syncthreads();
}
if (tid == 0) output[blockIdx.x] = sdata[0];
}
6. 高级技巧与工具
6.1 缓存提示(Cache Hints)
CUDA 提供内存访问的缓存策略控制:
// 使用 __ldg() 通过只读数据缓存(texture cache)加载
// 适合只读数据,可避免 L1 缓存污染
float val = __ldg(&input[tid]);
// PTX 级别的缓存控制(通过 inline asm 或编译器 flag)
// .ca (cache all levels) — 默认,缓存到 L1 和 L2
// .cg (cache global) — 只缓存到 L2,跳过 L1
// .cs (cache streaming) — 标记为流式数据,优先级低
// .cv (cache volatile) — 不缓存,每次都从显存读
6.2 内存访问分析工具
使用 Nsight Compute 的关键指标:
# 全局内存效率
sm__sass_average_data_bytes_per_sector_mem_global_op_ld # 理想128B
l1tex__t_sectors_pipe_lsu_mem_global_op_ld # 实际事务数
# 计算带宽利用率
gpu__compute_memory_throughput # 实际吞吐
dram__bytes_read + dram__bytes_write # 实际传输量
6.3 优化决策流程图
graph TD
A["分析 Kernel 性能"] --> B{"Memory-Bound?"}
B -->|是| C["检查全局内存访问模式"]
B -->|否| D["优化计算逻辑"]
C --> E{"合并访问?"}
E -->|否| F["重排数据布局 / SoA"]
E -->|是| G["检查共享内存"]
G --> H{"Bank Conflict?"}
H -->|是| I["Padding / Swizzle"]
H -->|否| J["尝试向量化加载"]
J --> K{"已达带宽上限?"}
K -->|是| L["优化完成"]
K -->|否| M["减少冗余访问 / 增加复用"]
📝 总结
| 优化技术 | 核心要点 | 收益 |
|---|---|---|
| 合并访问 | 连续线程访问连续地址,SoA 优于 AoS | 最高 32x 带宽差异 |
| 对齐访问 | 起始地址对齐到 128B 边界 | 避免额外事务 |
| Padding | 共享内存 [N][N+1] 打破 Bank 周期 | 消除 Bank Conflict |
| 向量化加载 | float4 / int4 一次读 16B | 减少 75% 指令数 |
| 缓存提示 | __ldg()、cache policy 控制 | 减少缓存污染 |
| 数据布局 | AoS → SoA,行列互换 | 结构性解决合并问题 |
🎯 自我检验清单
- 能判断给定的内存访问模式是否满足合并访问条件
- 能计算一个 Warp 的全局内存访问需要多少个 32B 事务
- 能将 AoS 数据结构改写为 SoA 以实现合并访问
- 能解释共享内存 Bank 的编址方式及 Bank Conflict 的产生原因
- 能对存在 32-way Bank Conflict 的代码添加 Padding 解决冲突
- 能正确使用
float4向量类型实现向量化加载和存储 - 能处理向量化加载中的对齐问题和尾部元素
- 能使用共享内存将非合并的全局内存写入转化为合并写入
- 能用 Nsight Compute 识别内存效率相关的性能指标
- 能对矩阵转置 Kernel 应用完整的内存访问优化链
📚 参考资料
- NVIDIA CUDA C++ Programming Guide - Memory Hierarchy
- NVIDIA CUDA C++ Best Practices Guide - Memory Optimizations
- An Efficient Matrix Transpose in CUDA C/C++ - NVIDIA Developer Blog
- How to Access Global Memory Efficiently in CUDA C/C++ Kernels - NVIDIA Developer Blog
- CUTLASS: CUDA Templates for Linear Algebra Subroutines - GitHub