3.1 CUDA Reduce算子优化
Reduce(规约)是 GPU 编程中最基础、也最能体现并行思维的算子之一
Reduce(规约)是 GPU 编程中最基础、也最能体现并行思维的算子之一。本文从最朴素的实现出发,逐步引入 Warp 级原语、向量化访存、多元素处理等优化手段,每一步都有性能对比和原理解析,帮你真正搞懂”怎么写出快的 Kernel”。
📑 目录
- 1. Reduce 算子基础
- 2. 版本 V0:朴素并行规约
- 3. 版本 V1:消除 Warp Divergence
- 4. 版本 V2:解决 Bank Conflict
- 5. 版本 V3:解决idle线程
- 6. 版本 V4:展开最后一个 Warp
- 7. 版本 V5:完全循环展开
- 8. 版本 V6:Warp Shuffle 替代 Shared Memory
- 9. 版本 V7:向量化加载 + Grid Stride Loop
- 10. 性能对比与选择建议
- 总结
- 自我检验清单
- 参考资料
1. Reduce 算子基础
1.1 什么是 Reduce
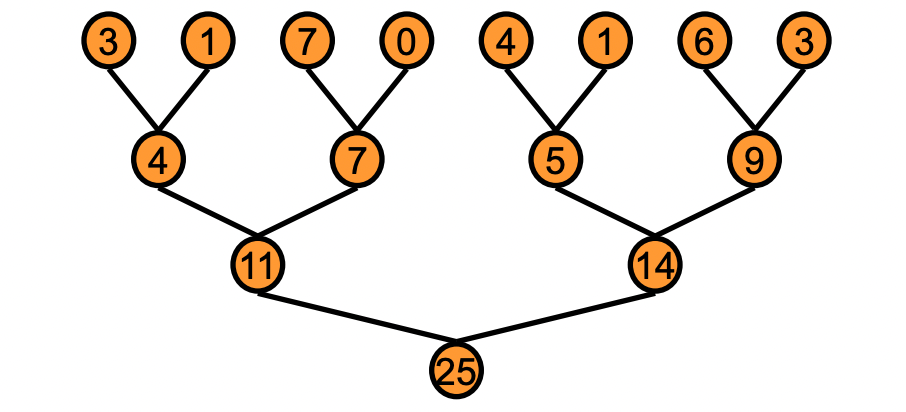
想象你手里有一千张写了数字的卡片,要求出总和。单人从头加到尾需要 999 次加法,而如果有 500 个人同时参与——两两配对相加,每轮人数减半——只需要约 10 轮就能得到结果。这就是并行规约的本质。
Reduce 是一类”多输入 → 单输出”的操作,常见形式包括:
- Sum Reduce:
- Max/Min Reduce:
- Dot Product:
本文以 Sum Reduce 为例(其他操作原理相通),输入为长度 的 float 数组,输出为所有元素之和。
1.2 性能瓶颈分析
GPU Kernel 的性能上限由计算量和访存量共同决定,可以用 Roofline 模型来定位瓶颈。对于 Sum Reduce:
- 每个元素读取一次(1 次 load)
- 每次读取后做一次加法(1 次 FLOP)
- 算术强度 (每个
float元素 4 字节,对应 1 次加法)
这表明 Reduce 是典型的访存密集型(Memory-Bound)操作,优化的核心在于提升内存带宽利用率,而不是减少计算次数。
1.3 测试环境说明
本文所有代码使用 CUDA 12.x 编写,测试在 A100 80GB SXM4 上进行:
| 指标 | 数值 |
|---|---|
| 理论内存带宽 | 2,039 GB/s |
| L2 Cache 容量 | 40 MB |
| SM 数量 | 108 |
| 每 SM Shared Memory | 164 KB |
测试数据规模:(128M 个 float,共 512 MB)
2. 版本 V0:朴素并行规约
2.1 算法思路
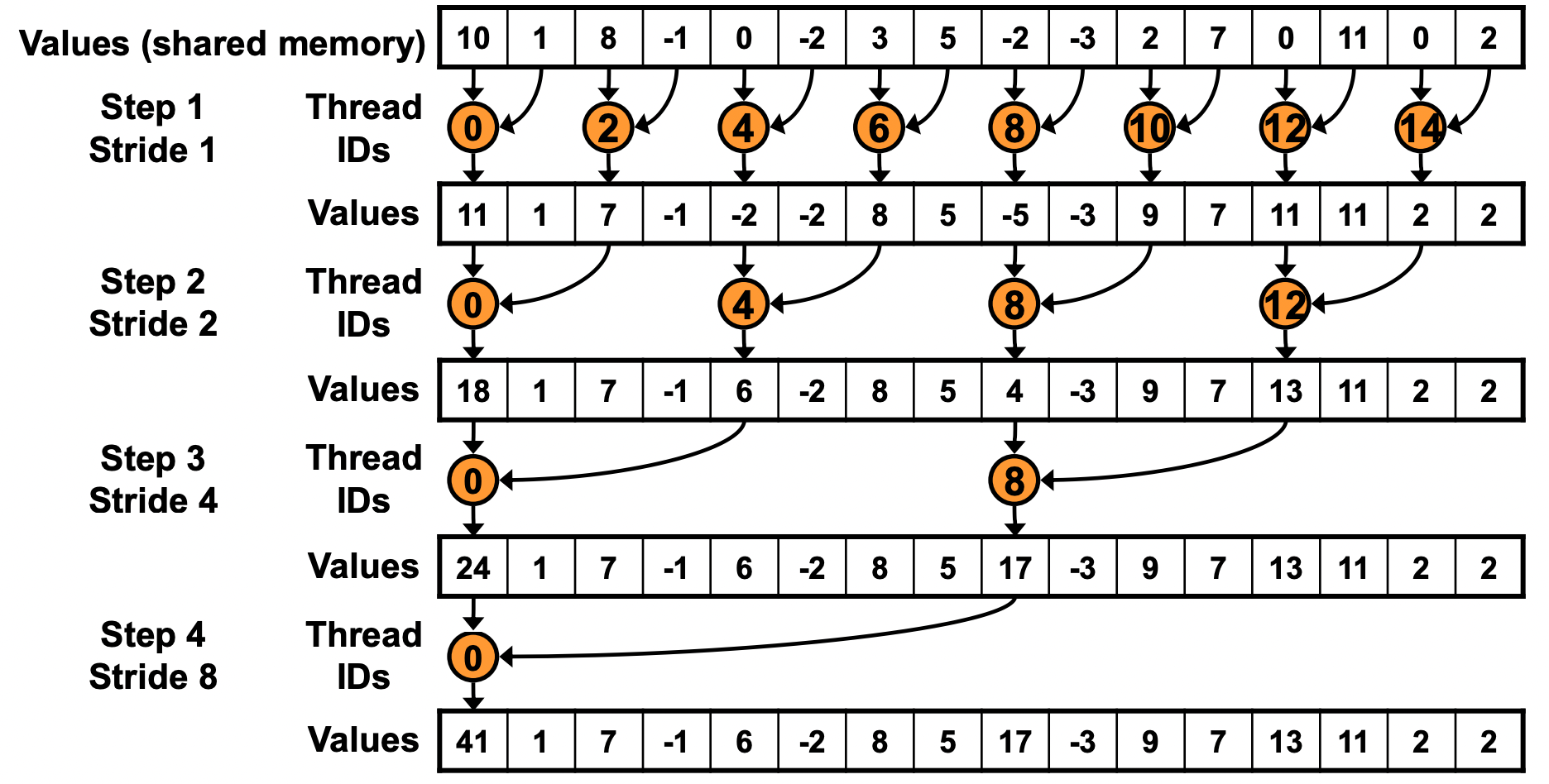
最直观的 Reduce 是”树形规约”:每轮迭代中,满足 tid % (2*step) == 0 的线程将自己的值与偏移 step 处的值相加,步长每次翻倍,直到所有值汇聚到第 0 号元素。
2.2 Kernel 实现
// V0: 朴素的树形规约(步长从小到大)
__global__ void reduce_v0(float* input, float* output, int n) {
extern __shared__ float smem[];
int tid = threadIdx.x;
int gid = blockIdx.x * blockDim.x + threadIdx.x;
// 将全局内存数据加载到共享内存
smem[tid] = (gid < n) ? input[gid] : 0.0f;
__syncthreads();
// 树形规约:步长从 1 开始逐步翻倍
for (int step = 1; step < blockDim.x; step *= 2) {
if (tid % (2 * step) == 0) {
smem[tid] += smem[tid + step];
}
__syncthreads();
}
// 每个 Block 的结果写回全局内存
if (tid == 0) {
output[blockIdx.x] = smem[0];
}
}
2.3 性能问题:Warp Divergence
⚠️ 注意:V0 的 if (tid % (2 * step) == 0) 判断是性能杀手。
GPU 以 Warp(32 个线程)为调度单位,Warp 内所有线程必须执行相同的指令。当 Warp 内部分线程满足 if 条件、部分不满足时,GPU 会分两次执行(先执行满足条件的线程,再执行不满足的),实际吞吐减半——这就是 Warp Divergence(Warp 分化)。
在 V0 中,随着 step 增大,越来越多的 Warp 出现分化:
step=1时:每个 Warp 内只有偶数线程工作 → 50% 利用率step=2时:每 4 个线程只有 1 个工作 → 25% 利用率- …越来越差
V0 实测带宽利用率:约 15%(~300 GB/s)
3. 版本 V1:消除 Warp Divergence
3.1 改进思路
V0 产生 Warp Divergence 的根源是 tid % (2*step) == 0 这个判断让同一 Warp 内的线程走不同分支。一个直接的优化思路是:不改变规约的步长方向(仍然从小到大),但改变线程映射关系——让相邻的线程负责相邻步长对应的加法,而不是”按 tid 间隔挑选”。
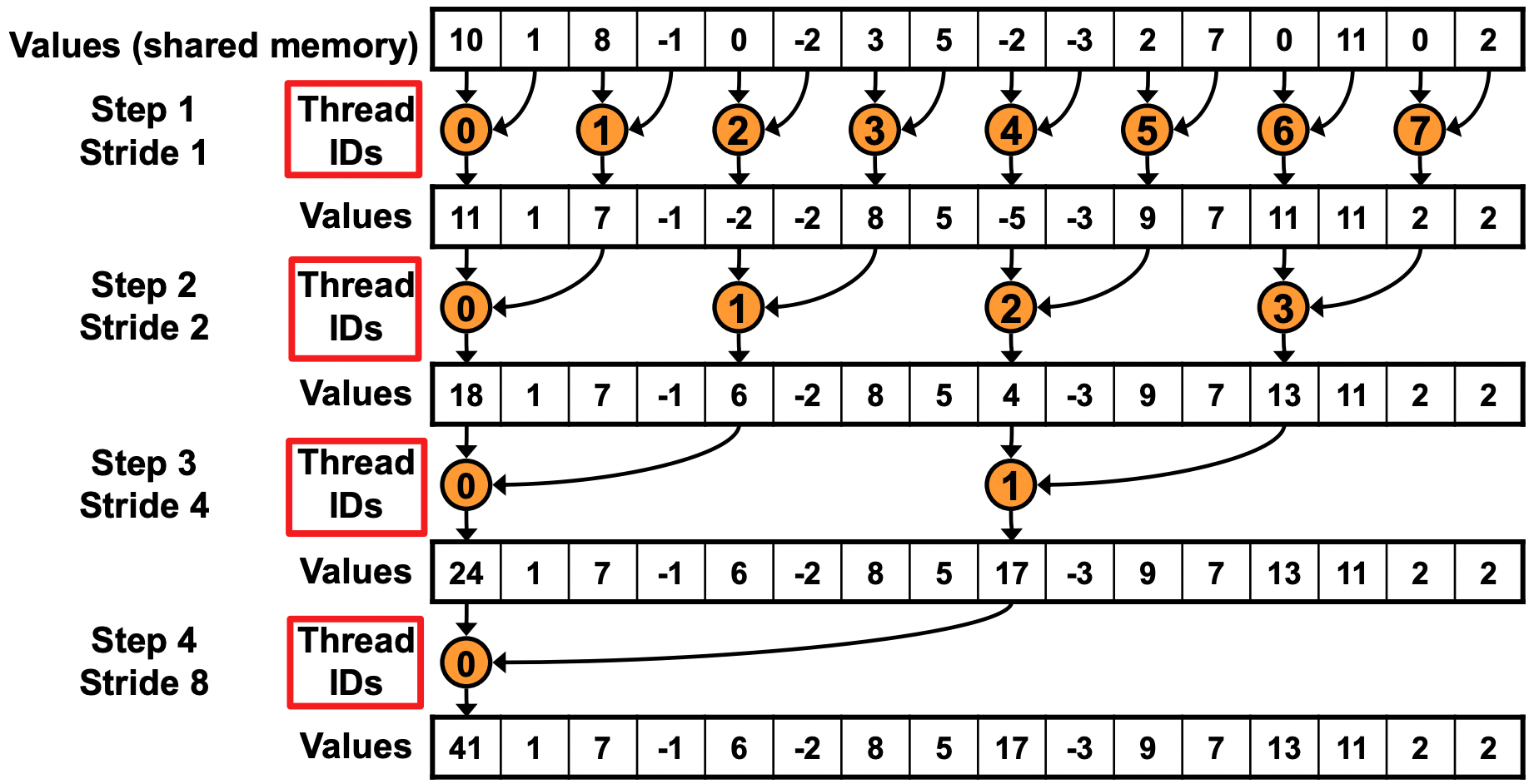
具体做法是把 if (tid % (2*s) == 0) 改成 strided index 形式:每个线程先计算出自己应该操作的内存下标 index = threadIdx.x * 2 * s,然后只判断 index < blockDim.x。
这样在第 1 轮(s=1)时:tid 0~127 的 index 都小于 blockDim.x(=256),tid 128~255 的 index 都 ≥ 256。前 4 个 Warp(共 128 线程)整体进入 if 分支,后 4 个 Warp 整体跳过——Warp 内不会分化。随着 s 增大,活跃线程的范围集中到更小的 tid 区间,直到 s=8 时活跃线程不足 32 个,同一个 Warp 内才开始出现分化。相比 V0 每一轮都分化,这里只有最后 5 轮(s=8, 16, 32, 64, 128)会产生分化,且都集中在 Warp 0 内部,开销极小。
3.2 Kernel 实现
// V1: strided index 方式,减少 Warp Divergence
__global__ void reduce_v1(float* input, float* output, int n) {
extern __shared__ float smem[];
int tid = threadIdx.x;
int gid = blockIdx.x * blockDim.x + threadIdx.x;
smem[tid] = (gid < n) ? input[gid] : 0.0f;
__syncthreads();
// 步长从 1 开始逐步翻倍,但用 strided index 映射活跃线程
for (unsigned int s = 1; s < blockDim.x; s *= 2) {
int index = threadIdx.x * 2 * s;
if (index < blockDim.x) {
smem[index] += smem[index + s];
}
__syncthreads();
}
if (tid == 0) {
output[blockIdx.x] = smem[0];
}
}
3.3 为什么能减少 Warp Divergence
以 blockDim=256 为例,逐轮分析活跃线程数:
s=1:index = 2·tid,活跃线程是 tid 0~127,恰好 4 个完整 Warp → 无分化s=2:index = 4·tid,活跃线程是 tid 0~63,恰好 2 个完整 Warp → 无分化s=4:活跃线程 tid 0~31,恰好 1 个完整 Warp → 无分化s=8:活跃线程 tid 0~15,同属 Warp 0 → 仅 Warp 0 内分化s=16、32、64、128:活跃线程只剩 Warp 0 内少量线程 → 每轮 1 次分化
💡 提示:前几轮完全消除分化,仅最后几轮(工作线程很少时)存在 Warp 内分化,总体开销远小于 V0。
V1 实测带宽利用率:约 32%(~653 GB/s),相比 V0 提升约 2.1 倍。
4. 版本 V2:解决 Bank Conflict
4.1 Shared Memory Bank 简介
Shared Memory 被划分为 32 个 Bank(默认 32-bit 模式,每个 Bank 宽度为 4 字节)。相邻的 4 字节地址依次落到 Bank 0、Bank 1、…、Bank 31、Bank 0、Bank 1、……如此循环。
理想情况下,同一 Warp 内的 32 个线程访问 32 个不同 Bank,可以同时完成——这叫无冲突访问。但如果一个 Warp 内有两个或多个线程访问同一个 Bank 的不同地址,访问就会串行化,这就是 Bank Conflict。
⚠️ 注意:同一 Warp 内多个线程访问同一地址不会产生冲突(硬件可以广播),只有访问同一 Bank 的不同地址才会冲突。
4.2 V1 中的 Bank Conflict 分析
V1 的 Kernel 看似消除了大部分 Warp Divergence,但访问 Shared Memory 时存在严重的 Bank Conflict。仍以 blockDim=256、Warp 0(tid 0~31)为例:
- 第 1 轮(s=1):tid 0 访问 smem[0]、smem[1];tid 16 访问 smem[32]、smem[33]。smem[0] 和 smem[32] 都落在 Bank 0 → 2 路 Bank Conflict
- 第 2 轮(s=2):tid 0 访问 smem[0,2];tid 8 访问 smem[32,34];tid 16 访问 smem[64,66];tid 24 访问 smem[96,98]。smem[0]、smem[32]、smem[64]、smem[96] 都在 Bank 0 → 4 路 Bank Conflict
- 第 3 轮(s=4):8 路 Bank Conflict
- 以此类推…
这使得 V1 的 Shared Memory 访问一直被 Bank Conflict 拖累。
4.3 改进思路:反转步长方向
解决方案是把规约方向反过来:不再从小步长开始逐步翻倍,而是从 blockDim.x/2 开始逐步减半。同时让低编号线程始终是活跃线程:
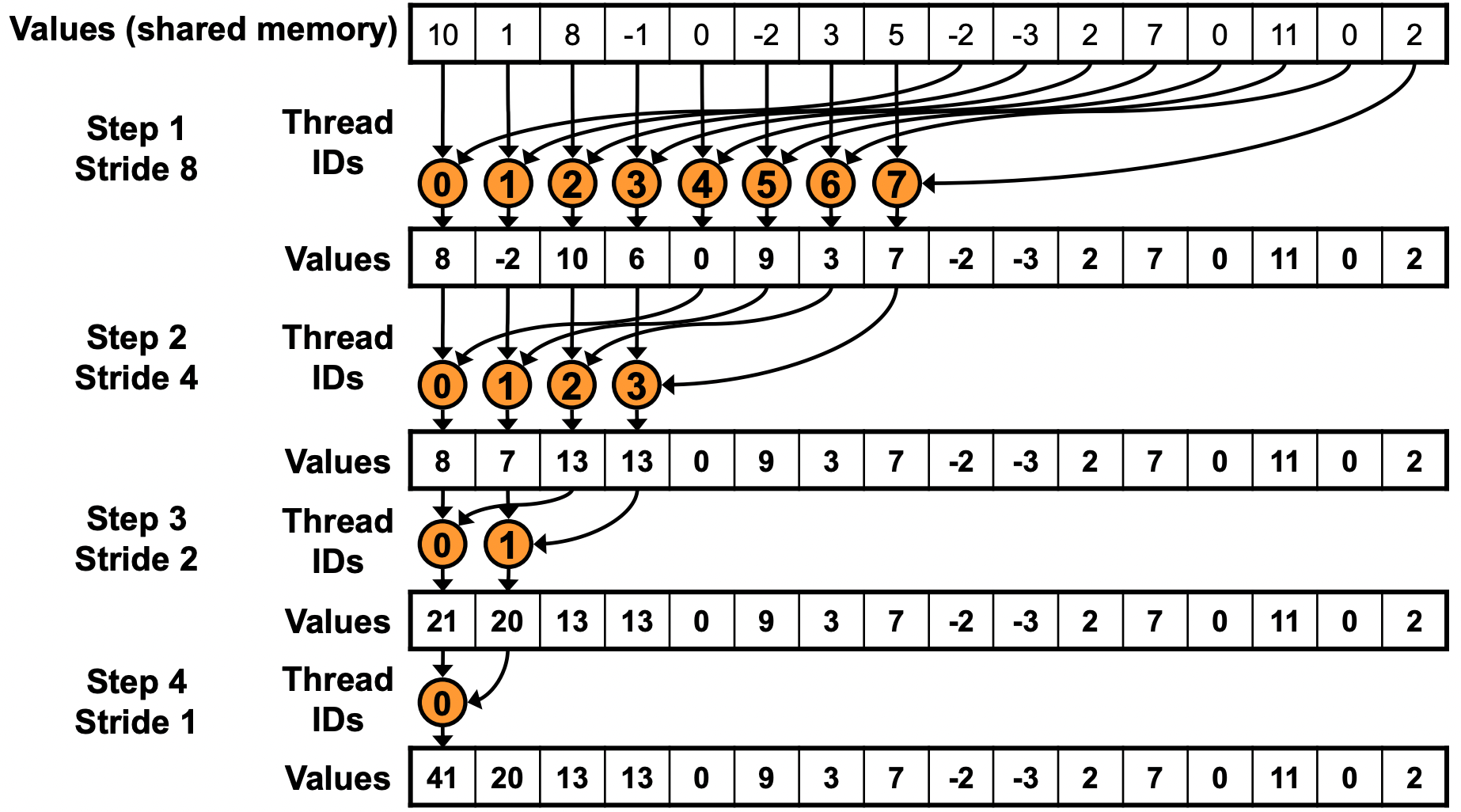
在这种模式下,以 Warp 0 为例:
- 第 1 轮(step=128):tid 0 访问 smem[0, 128],tid 1 访问 smem[1, 129],…,tid 31 访问 smem[31, 159]。这 32 个线程分别访问 Bank 0~31 的不同地址 → 无 Bank Conflict
- 第 2 轮(step=64)、第 3 轮(step=32) 同理,32 个线程刚好覆盖 32 个 Bank
- 当 step ≤ 16 时,活跃线程减少,剩下的访问也完全落在不同 Bank 上
此外,由于活跃线程始终是连续的低编号线程,这种方式也天然消除了 Warp Divergence:每个 Warp 要么整体工作、要么整体空闲。
4.4 Kernel 实现
// V2: 步长从大到小,同时消除 Warp Divergence 与 Bank Conflict
__global__ void reduce_v2(float* input, float* output, int n) {
extern __shared__ float smem[];
int tid = threadIdx.x;
int gid = blockIdx.x * blockDim.x + threadIdx.x;
smem[tid] = (gid < n) ? input[gid] : 0.0f;
__syncthreads();
// 步长从 blockDim.x/2 开始,每轮减半
for (unsigned int s = blockDim.x / 2; s > 0; s >>= 1) {
if (tid < s) {
smem[tid] += smem[tid + s];
}
__syncthreads();
}
if (tid == 0) {
output[blockIdx.x] = smem[0];
}
}
💡 提示:以 blockDim=256、step=128 为例:tid < 128 的 4 个完整 Warp 工作,tid ≥ 128 的 4 个完整 Warp 空闲,同一 Warp 内所有线程执行相同路径,没有分化;同时每个 Warp 的 32 个线程访问 32 个不同 Bank,没有冲突。
V2 实测带宽利用率:约 40%(~816 GB/s),相比 V1 提升约 1.25 倍。
5. 版本 V3:解决idle线程
5.1 问题:一半线程在”打酱油”
回顾 V0-V2 的数据加载方式:每个线程只负责 1 个元素,即每个 Block 处理 blockDim.x 个数据。以 blockDim=256、 为例,需要 个 Block。
问题在于:规约的第一轮(step = blockDim.x/2)迭代中,只有前 128 个线程参与后续计算,后 128 个线程就彻底闲置了——它们的唯一贡献就是把数据从全局内存搬到了 Shared Memory。
换个角度看:如果每个线程在加载阶段就负责 2 个元素并预先求和,那么用同样 256 个线程可以处理 512 个数据——Block 数量减半(262144 个),而规约阶段的工作量不变。这意味着:
- Grid 更小,调度开销降低
- 每个线程在加载阶段就已经做了”有用功”,不再是纯搬运工
5.2 Kernel 实现
// V3: 每线程处理 2 个元素,减少空闲线程
__global__ void reduce_v3(float* input, float* output, int n) {
extern __shared__ float smem[];
int tid = threadIdx.x;
int gid = blockIdx.x * (blockDim.x * 2) + threadIdx.x;
// 每个线程加载 2 个相距 blockDim.x 的元素并求和
float val = 0.0f;
if (gid < n) val += input[gid];
if (gid + blockDim.x < n) val += input[gid + blockDim.x];
smem[tid] = val;
__syncthreads();
// 步长从大到小的规约(同 V2)
for (unsigned int s = blockDim.x / 2; s > 0; s >>= 1) {
if (tid < s) {
smem[tid] += smem[tid + s];
}
__syncthreads();
}
if (tid == 0) {
output[blockIdx.x] = smem[0];
}
}
💡 提示:注意 Grid 配置的变化——因为每个 Block 现在处理 blockDim.x * 2 个元素,Block 数量应设为 (n + blockDim.x * 2 - 1) / (blockDim.x * 2)。
5.3 为什么有效
这个优化本质上是在不增加规约轮数的前提下,让每个线程承担更多工作:
| 对比项 | V2(1 元素/线程) | V3(2 元素/线程) |
|---|---|---|
| Block 处理元素数 | 256 | 512 |
| 所需 Block 数 | 524,288 | 262,144 |
| 加载阶段计算 | 0 次加法 | 1 次加法/线程 |
| 规约轮数 | 8 轮 | 8 轮(不变) |
Block 数量减半意味着 GPU 调度器的压力降低,同时全局内存的访问模式更规整(连续的两段数据被同一 Block 处理)。
V3 实测带宽利用率:约 45%(~918 GB/s),相比 V2 提升约 1.12 倍。
6. 版本 V4:展开最后一个 Warp
6.1 V3 的隐藏瓶颈:多余的 __syncthreads()
V3 在规约阶段仍然使用完整的 for 循环,当 step <= 32 时,只有 1 个 Warp 的线程(tid 0~31)还在工作。此时循环里的 __syncthreads() 完全是多余的,因为同一 Warp 内的线程在执行相同指令路径时本身就是同步的,不需要额外的屏障。这些多余的 __syncthreads() 带来了不必要的开销。
6.2 Unroll Last Warp(展开最后一个 Warp)
当 step <= 32 时只剩 1 个 Warp 在工作,可以直接展开循环,省去 __syncthreads() 的同步开销:
// 辅助函数:展开最后 32 个线程的规约
__device__ void warpReduce(volatile float* smem, int tid) {
smem[tid] += smem[tid + 32];
smem[tid] += smem[tid + 16];
smem[tid] += smem[tid + 8];
smem[tid] += smem[tid + 4];
smem[tid] += smem[tid + 2];
smem[tid] += smem[tid + 1];
}
// V4: 展开最后一个 Warp(在 V3 基础上)
__global__ void reduce_v4(float* input, float* output, int n) {
extern __shared__ float smem[];
int tid = threadIdx.x;
int gid = blockIdx.x * (blockDim.x * 2) + threadIdx.x;
// 每线程处理 2 个元素(继承自 V3)
float val = 0.0f;
if (gid < n) val += input[gid];
if (gid + blockDim.x < n) val += input[gid + blockDim.x];
smem[tid] = val;
__syncthreads();
// 规约循环仅执行到 step > 32
for (unsigned int s = blockDim.x / 2; s > 32; s >>= 1) {
if (tid < s) {
smem[tid] += smem[tid + s];
}
__syncthreads();
}
// 最后一个 Warp 内的规约,无需 __syncthreads()
if (tid < 32) {
warpReduce(smem, tid);
}
if (tid == 0) {
output[blockIdx.x] = smem[0];
}
}
⚠️ 注意:warpReduce 中的 smem 必须声明为 volatile,防止编译器将中间结果缓存到寄存器,导致其他线程读取到旧值。这是保证 Warp 内线程间数据可见性的关键。
6.3 优化效果分析
以 blockDim=256 为例,V3 的规约循环有 8 轮(step = 128, 64, 32, 16, 8, 4, 2, 1),每轮都执行 __syncthreads()。V4 将后 5 轮(step ≤ 32)展开为直线代码,省去 5 次 __syncthreads() 调用。
V4 实测带宽利用率:约 52%(~1060 GB/s),相比 V3 提升约 1.15 倍。
7. 版本 V5:完全循环展开
7.1 剩余的循环开销
V4 展开了最后一个 Warp,但前几轮(step = 128, 64)仍然是运行时循环。每次循环迭代都包含:
- 边界判断(
s > 32) - 分支跳转
- 循环变量更新(
s >>= 1)
对于 Block 大小在编译期已知的情况(如固定为 256),这些开销完全可以消除。
7.2 使用模板参数实现编译期展开
通过将 Block 大小作为模板参数传入,编译器可以在编译时确定所有循环的迭代次数,直接生成展开后的代码:
// V5: 完全循环展开(模板参数)
template <int BLOCK_SIZE>
__global__ void reduce_v5(float* input, float* output, int n) {
extern __shared__ float smem[];
int tid = threadIdx.x;
int gid = blockIdx.x * (BLOCK_SIZE * 2) + threadIdx.x;
// 每线程处理 2 个元素
float val = 0.0f;
if (gid < n) val += input[gid];
if (gid + BLOCK_SIZE < n) val += input[gid + BLOCK_SIZE];
smem[tid] = val;
__syncthreads();
// 编译期展开:BLOCK_SIZE 已知,不满足的分支会被编译器直接删除
if (BLOCK_SIZE >= 512) { if (tid < 256) smem[tid] += smem[tid + 256]; __syncthreads(); }
if (BLOCK_SIZE >= 256) { if (tid < 128) smem[tid] += smem[tid + 128]; __syncthreads(); }
if (BLOCK_SIZE >= 128) { if (tid < 64) smem[tid] += smem[tid + 64]; __syncthreads(); }
// 最后 Warp 内展开
if (tid < 32) {
volatile float* vsmem = smem;
if (BLOCK_SIZE >= 64) vsmem[tid] += vsmem[tid + 32];
vsmem[tid] += vsmem[tid + 16];
vsmem[tid] += vsmem[tid + 8];
vsmem[tid] += vsmem[tid + 4];
vsmem[tid] += vsmem[tid + 2];
vsmem[tid] += vsmem[tid + 1];
}
if (tid == 0) output[blockIdx.x] = smem[0];
}
调用时需要根据 Block 大小选择对应的模板实例化:
switch (block_size) {
case 512: reduce_v5<512><<<grid, 512, 512*sizeof(float)>>>(d_in, d_out, n); break;
case 256: reduce_v5<256><<<grid, 256, 256*sizeof(float)>>>(d_in, d_out, n); break;
case 128: reduce_v5<128><<<grid, 128, 128*sizeof(float)>>>(d_in, d_out, n); break;
}
7.3 为什么模板展开比运行时循环更快
💡 提示:以 BLOCK_SIZE=256 为例,编译器生成的代码等价于:
// 编译后实际生成的指令序列(无循环、无分支判断):
if (tid < 128) smem[tid] += smem[tid + 128]; __syncthreads();
if (tid < 64) smem[tid] += smem[tid + 64]; __syncthreads();
// 然后直接展开 Warp 内规约...
BLOCK_SIZE >= 512 的条件在编译期为假,整个 if 块被删除,不生成任何指令。最终的机器码是一段紧凑的直线代码,没有循环跳转、没有死代码。
V5 实测带宽利用率:约 62%(~1265 GB/s),相比 V4 提升约 1.19 倍。
8. 版本 V6:Warp Shuffle 替代 Shared Memory
8.1 Warp Shuffle 原语
Warp 内的 32 个线程有一种特殊的通信方式:寄存器直接交换(Warp Shuffle),无需经过 Shared Memory。
// __shfl_down_sync:每个线程读取 lane_id+delta 处线程的寄存器值(下移操作)
float val = __shfl_down_sync(0xffffffff, var, delta);
参数说明:
0xffffffff:表示 Warp 内全部 32 个线程参与var:每个线程的寄存器值delta:偏移量(要读取的是lane_id + delta的值)
这比 Shared Memory 访问快很多,因为:
- 不需要地址计算
- 不会有 Bank Conflict
- 延迟更低(寄存器级互联)
8.2 两级规约策略
Warp Shuffle 只能在单个 Warp(32 线程)内进行,对于 256 或 512 个线程的 Block,需要两级规约:
- Warp 内规约:每个 Warp 内通过
__shfl_down_sync将 32 个值规约为 1 个值 - Warp 间规约:将各 Warp 的结果写入 Shared Memory,再做一轮规约
graph LR
A["256 线程<br>256 个值"] --> B["Warp 内规约<br>__shfl_down_sync<br>8个Warp × 32线程"]
B --> C["8 个中间值<br>写入 Shared Memory"]
C --> D["Warp 0 规约<br>最终结果"]
8.3 Kernel 实现
// Warp 内规约辅助函数
__device__ float warpReduceSum(float val) {
// 每次将右半边的值加到左半边
for (int offset = 16; offset > 0; offset >>= 1) {
val += __shfl_down_sync(0xffffffff, val, offset);
}
return val; // lane 0 持有最终结果
}
// V6: Warp Shuffle + 两级规约
__global__ void reduce_v6(float* input, float* output, int n) {
int tid = threadIdx.x;
int gid = blockIdx.x * (blockDim.x * 2) + threadIdx.x;
int lane = tid % 32; // 线程在 Warp 内的编号(0~31)
int wid = tid / 32; // 该线程属于哪个 Warp
// 每线程处理 2 个元素
float val = 0.0f;
if (gid < n) val += input[gid];
if (gid + blockDim.x < n) val += input[gid + blockDim.x];
// 第一级:Warp 内规约
val = warpReduceSum(val);
// 将每个 Warp 的结果(仅 lane 0 有效)存入 Shared Memory
__shared__ float warp_results[32]; // 最多 32 个 Warp(1024/32)
if (lane == 0) {
warp_results[wid] = val;
}
__syncthreads();
// 第二级:Warp 间规约(用 Warp 0 处理)
int num_warps = blockDim.x / 32;
if (wid == 0) {
val = (lane < num_warps) ? warp_results[lane] : 0.0f;
val = warpReduceSum(val);
}
if (tid == 0) output[blockIdx.x] = val;
}
V6 实测带宽利用率:约 72%(~1468 GB/s),相比 V5 提升约 1.16 倍。
9. 版本 V7:向量化加载 + Grid Stride Loop
9.1 向量化加载(float4)
GPU 的内存系统以**事务(Transaction)**为粒度传输数据,每次事务通常为 128 字节。如果每个线程每次只加载 4 字节(1 个 float),则:
- 一个 Warp 32 线程 × 4 字节 = 128 字节,恰好一个事务
- 但每条加载指令的调度开销是固定的
改为使用 float4(16 字节),每个线程每次加载 4 个 float:
- 每条
ld.global.v4.f32指令的数据吞吐是ld.global.f32的 4 倍 - 在相同的循环迭代次数下,处理的数据量翻 4 倍,等效地减少了循环次数
- 提升指令级并行(ILP),让访存流水线更饱和
9.2 Grid Stride Loop
V0-V6 中每个 Block 处理固定数量的数据。更灵活的模式是 Grid Stride Loop:固定 Grid 大小,让每个线程循环处理多段数据,直到覆盖整个数组。
好处:
- Grid 大小可以设置为恰好填满 GPU,避免尾部 Block 浪费,固定 Grid 大小为 SM 数 × 4(最大化 GPU 利用率)
- 对超大数组(超出最大 Grid 限制)同样适用
- 每个线程处理更多数据,充分摊销 Kernel 启动和规约的固定开销
9.3 Kernel 实现
// V7: float4 向量化加载 + Grid Stride Loop + Warp Shuffle
__global__ void reduce_v7(float* input, float* output, int n) {
int tid = threadIdx.x;
int lane = tid % 32;
int wid = tid / 32;
// float4 加载:每线程每次处理 4 个 float
float4* input4 = reinterpret_cast<float4*>(input);
int n4 = n / 4; // float4 的元素数量
float val = 0.0f;
// Grid Stride Loop:每个线程以 gridDim.x * blockDim.x 为步长迭代
for (int idx = blockIdx.x * blockDim.x + tid;
idx < n4;
idx += gridDim.x * blockDim.x)
{
float4 data = input4[idx];
val += data.x + data.y + data.z + data.w;
}
// 处理 n 不是 4 的倍数时的尾部元素
int tail_start = n4 * 4;
for (int idx = tail_start + blockIdx.x * blockDim.x + tid;
idx < n;
idx += gridDim.x * blockDim.x)
{
val += input[idx];
}
// Warp 内规约
for (int offset = 16; offset > 0; offset >>= 1) {
val += __shfl_down_sync(0xffffffff, val, offset);
}
__shared__ float warp_results[32];
if (lane == 0) warp_results[wid] = val;
__syncthreads();
int num_warps = blockDim.x / 32;
if (wid == 0) {
val = (lane < num_warps) ? warp_results[lane] : 0.0f;
for (int offset = 16; offset > 0; offset >>= 1) {
val += __shfl_down_sync(0xffffffff, val, offset);
}
}
if (tid == 0) output[blockIdx.x] = val;
}
调用方式:
// 固定 Grid 大小为 SM 数 × 4(最大化 GPU 利用率)
int num_sms;
cudaDeviceGetAttribute(&num_sms, cudaDevAttrMultiProcessorCount, 0);
int grid_size = num_sms * 4; // 432 for A100
int block_size = 256;
reduce_v7<<<grid_size, block_size>>>(d_input, d_partial, n);
V7 实测带宽利用率:约 85%(~1733 GB/s),相比 V6 提升约 1.18 倍。
10. 性能对比与选择建议
10.1 各版本性能汇总
| 版本 | 核心优化点 | 带宽利用率 | 相对速度 |
|---|---|---|---|
| V0 朴素树形 | 无 | ~15% | 1.0x |
| V1 交错寻址 | 减少 Warp Divergence | ~32% | 2.1x |
| V2 步长反转 | 消除 Bank Conflict + Divergence | ~40% | 2.7x |
| V3 双元素处理 | 减少空闲线程,Grid 减半 | ~45% | 3.0x |
| V4 展开最后 Warp | 省去 Warp 内多余 syncthreads | ~52% | 3.5x |
| V5 完全循环展开 | 模板参数,编译期消除所有循环 | ~62% | 4.1x |
| V6 Warp Shuffle | 寄存器直通,省去 Shared Memory | ~72% | 4.8x |
| V7 向量化 + Stride Loop | 提升访存效率 + 完整覆盖 GPU | ~85% | 5.7x |
📌 关键点:理论峰值带宽 2039 GB/s,V7 达到 ~1733 GB/s(约 85%),已接近实际可达上限(受 ECC、时钟波动等影响,85-90% 是 Reduce 的合理目标)。
10.2 优化收益来源分析
graph TD
A["Reduce 性能瓶颈"] --> B["计算效率低<br>Warp Divergence"]
A --> B2["Shared Memory 冲突<br>Bank Conflict"]
A --> C["同步开销大<br>多余 syncthreads"]
A --> D["访存效率低<br>逐元素加载"]
A --> E["GPU 利用不足<br>线程/Block 空闲"]
B --> F["V1: 交错寻址<br>V2: 步长反转"]
B2 --> F2["V2: 步长反转"]
C --> G["V4: 展开最后 Warp<br>V5: 完全循环展开"]
D --> H["V6: Warp Shuffle<br>V7: float4 加载"]
E --> I["V3: 双元素处理<br>V7: Grid Stride Loop"]
10.3 实际工程选择建议
| 场景 | 推荐方案 |
|---|---|
| 学习/教学 | V2 或 V4,逻辑清晰易理解 |
| 生产环境通用 | V6 Warp Shuffle 版本 |
| 超大数组(>1GB) | V7 Grid Stride Loop |
| 追求极致性能 | 使用 CUB 库的 cub::DeviceReduce |
💡 提示:生产环境中优先使用 NVIDIA CUB 库中的 cub::DeviceReduce::Sum,它在各种 GPU 架构上做了针对性优化,通常能达到 90% 以上的带宽利用率,且维护成本为零。
📝 总结
从 V0 到 V7,每一步优化都针对一个具体的性能瓶颈:
- Warp Divergence(初步):用 strided index 替换
tid % (2*s) == 0判断,让完整 Warp 进入/跳过分支(V1) - Bank Conflict + Warp Divergence(彻底):反转步长方向,从
blockDim/2逐步减半,一次性解决两类问题(V2) - 空闲线程:每线程处理 2 个元素,减少 Block 数量,提升线程利用率(V3)
- 多余同步:Warp 内天然同步,展开最后 5 轮可以省去
__syncthreads()(V4) - 循环开销:模板参数让编译器删除无用分支,生成紧凑的直线代码(V5)
- 访存层次:Warp Shuffle 直接在寄存器间通信,比 Shared Memory 更快(V6)
- 带宽效率:
float4减少指令数,Grid Stride Loop 最大化 GPU 占用率(V7)
理解这些优化思路,不仅对 Reduce 有用——在几乎所有 Memory-Bound Kernel 的设计中,同样的思路都会反复出现。
🎯 自我检验清单
- 能解释 Warp Divergence 产生的原因,以及 V1(交错寻址)和 V2(步长反转)如何分别减少/消除它
- 能描述 Shared Memory Bank Conflict 的概念,并说明 V2 为什么能同时消除 Bank Conflict
- 能解释 V3 中”每线程处理 2 个元素”相比”每线程 1 个元素”的性能收益来源
- 能解释 V4 为什么在最后一个 Warp 中可以省去
__syncthreads() - 能解释为什么使用模板参数(
template <int BLOCK_SIZE>)能提升性能 - 能写出使用
__shfl_down_sync实现 Warp 内规约的代码 - 能解释两级规约(Warp 内 + Warp 间)的完整流程
- 能说明
float4向量化加载相比逐元素加载的优势 - 能描述 Grid Stride Loop 的工作方式及其适用场景
- 能使用 Nsight Compute 的 Memory Throughput 指标验证各版本的带宽利用率
📚 参考资料
- NV官方教程
- 深入浅出GPU优化系列:reduce优化
- CUDA性能优化篇-reduce算子
- BBuf的CUDA笔记三,reduce优化入门学习笔记
- CUDA C++ Programming Guide - Warp Shuffle Functions
- Optimizing Parallel Reduction in CUDA - Mark Harris, NVIDIA
- NVIDIA CUB Library - DeviceReduce
- CUDA C++ Best Practices Guide - Memory Optimizations
- NVIDIA Nsight Compute Documentation