4.1 CUDA GEMM算子性能优化
GEMM,本文从朴素实现出发,逐步Block-Warp-Thread三级Tiling优化、向量化访存、Bank Conflict 消除、双缓冲等优化手段,带你系统掌握 CUDA GEMM 优化的完整方法论。
矩阵乘法(GEMM)是深度学习中最核心的计算原语——从全连接层到注意力机制,绝大多数运算最终都归结为矩阵乘法。本文从朴素实现出发,逐步Block-Warp-Thread三级Tiling优化、向量化访存、Bank Conflict 消除、双缓冲等优化手段,带你系统掌握 CUDA GEMM 优化的完整方法论。
📑 目录
- 1. 背景与问题定义
- 2. 性能分析方法论
- 3. 朴素实现:建立 Baseline
- 4. Thread Block级 Tiling优化
- 5. Thread级Tiling优化
- 6. Warp 级分块优化
- 7. 向量化访存:float4 优化
- 8. Bank Conflict 消除
- 9. 双缓冲与流水线
- 10. Ampere 异步拷贝流水线
- 11. SASS 级优化与寄存器调度
- 12. 实战参数选择与调优指南
- 总结
- 自我检验清单
- 参考资料
1. 背景与问题定义
1.1 GEMM 的定义
GEMM(General Matrix Multiply)计算的是:
其中 的维度为 , 为 , 为 。总浮点运算量为 FLOPs(每个输出元素需要 次乘法和 次加法)。
1.2 为什么 GEMM 如此重要
深度学习模型中大量运算的底层实现都依赖 GEMM:
- 全连接层:,直接是矩阵乘法
- 卷积层:通过 im2col 转化为 GEMM
- 注意力机制: 和 都是矩阵乘法
- Batched GEMM:多头注意力中的批量矩阵乘
优化 GEMM 的收益会直接传递到几乎所有深度学习工作负载。
1.3 性能指标
衡量 GEMM kernel 性能的核心指标是有效算力(TFLOPS):
通常以占理论峰值算力的百分比来评估优化效果。cuBLAS 在大矩阵上通常能达到理论峰值的 90%+。
2. 性能分析方法论
2.1 Roofline 模型与计算访存比
GPU 的性能由两个物理上限决定:
- 计算上限:SM 的浮点吞吐(如 V100 约 15.7 TFLOPS FP32)
- 带宽上限:显存带宽(如 V100 HBM 约 900 GB/s)
一个 kernel 是计算瓶颈还是访存瓶颈,取决于它的算术强度(Arithmetic Intensity):
当算术强度超过平衡点(= 峰值算力 / 峰值带宽)时,kernel 受计算限制;否则受带宽限制。对 V100 而言,平衡点约为 FLOPs/Byte。
💡 提示:GEMM 优化的核心目标就是提高算术强度——通过数据复用让每字节数据参与尽可能多的计算。
2.2 带宽视角分析法
分析 GEMM kernel 性能时,应该用带宽而非延迟作为主要指标。原因是 GPU 的海量线程可以通过流水线隐藏延迟,但带宽是物理硬限。一个优化是否有效,最终看它是否减少了对某级存储的带宽需求。
GPU 存储层次的带宽参考值(以 V100 为例):
| 📊 存储层次 | ⚡ 带宽 | ⏱️ 延迟 |
|---|---|---|
| 寄存器 | ~20 TB/s | 0 cycle |
| Shared Memory | ~12 TB/s | 20-30 cycles |
| L2 Cache | ~2 TB/s | ~200 cycles |
| HBM (Global) | ~900 GB/s | 300-400 cycles |
2.3 Wave 模型与 L2 Cache 分析
Wave(执行波)是指 GPU 同一时刻能并行执行的 Thread Block 集合。例如 V100 有 80 个 SM,每个 SM 能容纳 2 个 Block,则一个 Wave 最多 160 个 Block。
矩阵 C 被划分为 个 Block Tile。如果一个 Wave 内的 Block 在 M 和 N 方向上分别跨越 和 个 Tile,则 L2 Cache 命中率的近似公式为:
⚠️ 注意:Thread Block 的调度顺序(行优先 vs 列优先 vs Z 形)会显著影响 L2 命中率,对大矩阵可产生 10% 以上的性能差异。
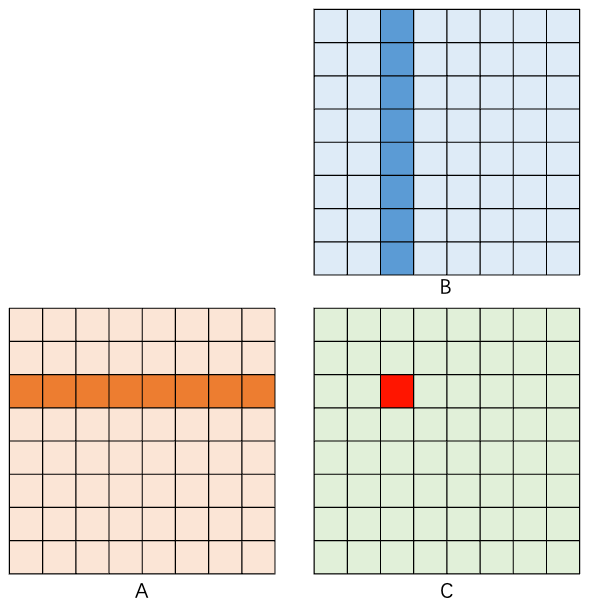
3. 朴素实现:建立 Baseline
3.1 最直接的实现
最简单的思路:每个线程负责计算 矩阵的一个元素,遍历 维度做内积。
__global__ void sgemm_naive(const float* A, const float* B, float* C,
int M, int N, int K) {
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
if (row < M && col < N) {
float sum = 0.0f;
for (int k = 0; k < K; k++) {
sum += A[row * K + k] * B[k * N + col];
}
C[row * N + col] = sum;
}
}
3.2 性能分析
这个 kernel 的算术强度极低。计算一个 :
- 运算量: FLOPs
- 数据搬运:读取 的一行( 个 float)+ 的一列( 个 float)= Bytes
远低于平衡点(17 FLOPs/Byte),严重受带宽限制。实测通常只有理论峰值的 6%~11%。
📌 关键点:朴素实现的根本问题是数据复用率几乎为零—— 的同一行被不同列的线程重复读取, 的同一列被不同行的线程重复读取,全部走 Global Memory。
4. Thread Block 级 Tiling 优化
4.1 核心思想
把矩阵 划分为 的分块,每个 Thread Block 负责一块。沿 维度以步长 迭代:每次将 的 子块和 的 子块协作搬运到 Shared Memory,然后在 Shared Memory 上做局部乘累加。
这就像一个流水线上的小仓库——与其每次从遥远的总仓(Global Memory)取货,不如每次批量运一小批到车间旁的货架(Shared Memory),然后工人们从货架上反复取用。
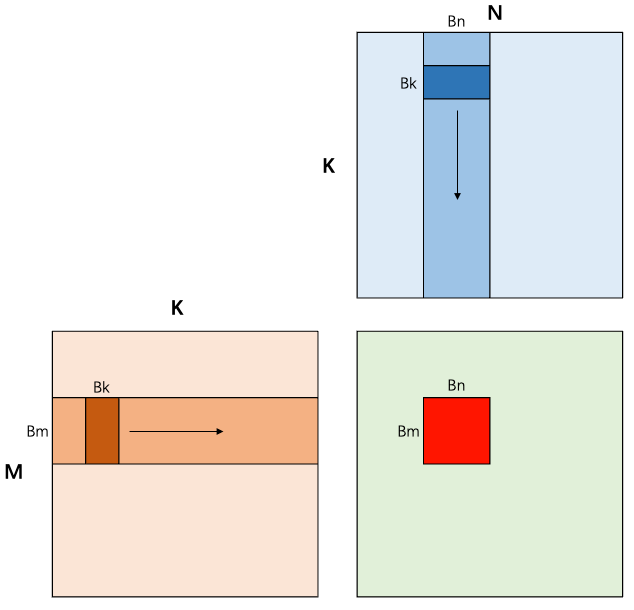
4.2 为什么沿 K 维度切分
既然要计算一块 的 ,一个自然的疑问是:为什么不直接取 的一整个 行块和 的一整个 列块,一次外积乘完?为什么还要沿 维度再切成 步迭代?
根本原因是 Shared Memory 容量有限。在实际场景中 往往是几千到上万, 和 两个块加起来动辄几十 MB,远超单个 SM 上 Shared Memory 的容量(通常仅 48~228 KB)。因此必须沿 方向切成大小为 的小块,分批载入 SMEM 累加。
沿 K 切分还带来一个关键的复用收益:每次载入 SMEM 的 子块()和 子块(),会被 block 内的所有线程协同复用—— 个输出元素都需要这对子块参与累加。换言之,一次 Global → SMEM 的搬运,能服务整个 block 的计算,把 Global Memory 访问量从 Naive 的 降到 量级。
💡 提示:沿 K 维度切分是 GEMM 分块优化的黄金法则。后续更深层的优化(线程分块、Warp 分块)也全部沿用这一原则——在每一层存储层级(Global → Shared → Register),都是沿 K 方向逐步迭代累加,让每份数据被尽可能多的下游计算复用。
4.3 计算访存比提升
分块后的算术强度:
将分子分母同除以 后可以看出:在 (即 Shared Memory 占用)固定的约束下,由均值不等式知 在 时取最小值,即当 与 越接近时,计算访存比越大。
取 :算术强度 = FLOPs/Byte,远超平衡点。
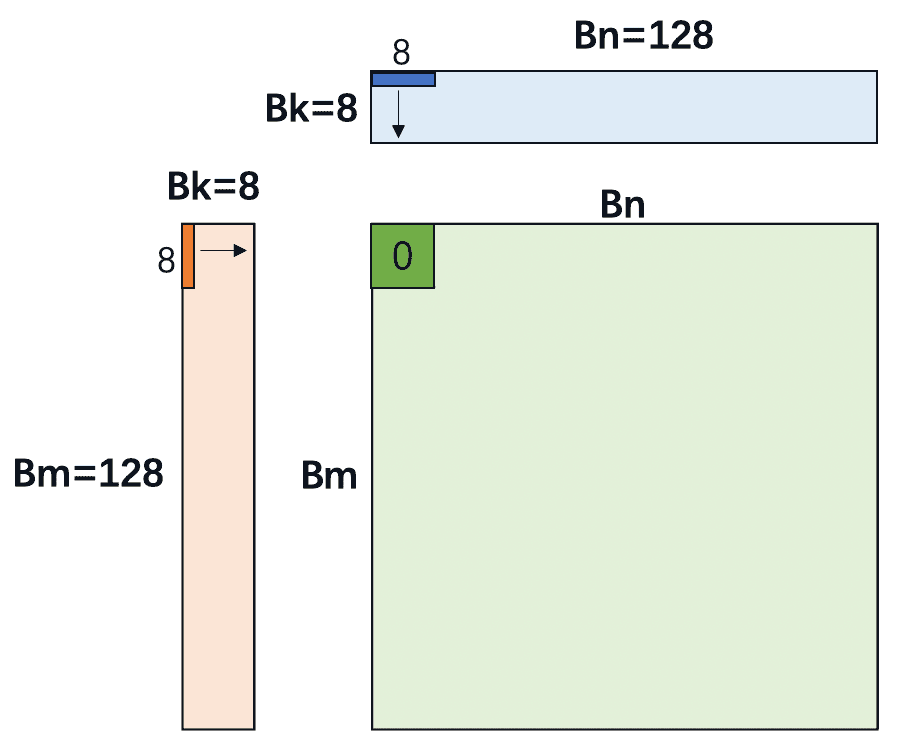
4.4 协作加载的线程排布
一个关键细节:加载 tileA 和 tileB 时,线程的排列方式应当保证 Global Memory 的合并访问(Coalesced Access)——即同一个 warp 内相邻线程访问连续内存地址。
以 为例:
- 加载 tileA():一行只有 8 个元素,应让 8 个相邻线程负责一行。256 个线程重排为 (32 行 × 8 列),每轮加载 32 行,循环 4 次覆盖 128 行。
- 加载 tileB():一行有 128 个元素,应让 32 个相邻线程负责一行的连续段。256 个线程重排为 (8 行 × 32 列),每轮加载所有 8 行,每行循环 4 次覆盖 128 列。
线程重排的索引计算:
int tid = threadIdx.x;
// 加载 tileA 时的线程坐标(8列×32行)
int a_thread_x = tid % 8; // 列方向
int a_thread_y = tid / 8; // 行方向
// 加载 tileB 时的线程坐标(32列×8行)
int b_thread_x = tid % 32; // 列方向
int b_thread_y = tid / 32; // 行方向
💡 提示:这种排布方式使同一个 warp(32 个连续 tid)在加载 tileB 时恰好覆盖一行的 32 个连续 float,实现完美合并访问。加载 tileA 时,warp 内的 32 个线程覆盖连续 4 行 × 8 列,每行的 8 个元素也是连续的。
4.5 代码实现
template <int BM, int BN, int BK, int BLOCK_SIZE>
__global__ void sgemm_block_tiling(float* A, float* B, float* C,
int M, int K, int N) {
__shared__ float As[BM][BK];
__shared__ float Bs[BK][BN];
int r0 = blockIdx.y * BM;
int c0 = blockIdx.x * BN;
int tid = threadIdx.x;
// 加载 tileA 时的线程重排
constexpr int A_BLOCK_X = BK; // = 8
constexpr int A_BLOCK_Y = BLOCK_SIZE / A_BLOCK_X; // = 32
int a_thread_x = tid % A_BLOCK_X;
int a_thread_y = tid / A_BLOCK_X;
// 加载 tileB 时的线程重排
constexpr int B_BLOCK_X = 32;
constexpr int B_BLOCK_Y = BLOCK_SIZE / B_BLOCK_X; // = 8
int b_thread_x = tid % B_BLOCK_X;
int b_thread_y = tid / B_BLOCK_X;
// 计算 tileC 时的线程排布(16×16)
constexpr int C_BLOCK_X = 16;
constexpr int C_BLOCK_Y = BLOCK_SIZE / C_BLOCK_X; // = 16
int c_thread_x = tid % C_BLOCK_X;
int c_thread_y = tid / C_BLOCK_X;
// 每个线程负责 Tm×Tn 个输出元素
constexpr int Tm = BM / C_BLOCK_Y; // = 8
constexpr int Tn = BN / C_BLOCK_X; // = 8
float Ct[Tm][Tn] = {0.0f};
// K-Loop
for (int k = 0; k < K; k += BK) {
// 协作加载 tileA(使用跨步循环覆盖 BM 行)
#pragma unroll
for (int i = a_thread_y; i < BM; i += A_BLOCK_Y) {
int r = r0 + i, c = k + a_thread_x;
As[i][a_thread_x] = (r < M && c < K) ? A[r * K + c] : 0.0f;
}
// 协作加载 tileB(使用跨步循环覆盖 BN 列)
#pragma unroll
for (int j = b_thread_x; j < BN; j += B_BLOCK_X) {
int r = k + b_thread_y, c = c0 + j;
Bs[b_thread_y][j] = (r < K && c < N) ? B[r * N + c] : 0.0f;
}
__syncthreads();
// 外积方式计算 As × Bs
#pragma unroll
for (int p = 0; p < BK; p++) {
for (int i = 0; i < Tm; i++) {
int row = c_thread_y + i * C_BLOCK_Y;
for (int j = 0; j < Tn; j++) {
int col = c_thread_x + j * C_BLOCK_X;
Ct[i][j] += As[row][p] * Bs[p][col];
}
}
}
__syncthreads();
}
// 写回结果
for (int i = 0; i < Tm; i++) {
int r = r0 + c_thread_y + i * C_BLOCK_Y;
for (int j = 0; j < Tn; j++) {
int c = c0 + c_thread_x + j * C_BLOCK_X;
if (r < M && c < N) C[r * N + c] = Ct[i][j];
}
}
}
⚠️ 注意:这里每个线程负责的 8×8 个输出元素并非连续的,而是以 C_BLOCK_Y=16 行、C_BLOCK_X=16 列为间距的跨步分布。这是因为 256 个线程排成 的网格,每个线程在 M 和 N 方向各”跳”8 次覆盖 的 tileC。
4.6 参数选择
| 📊 参数 | 📝 推荐值 | 💡 理由 |
|---|---|---|
| BM, BN | 128 | 算术强度 32,足以饱和计算单元 |
| BK | 8 | Shared Memory 占用可控(128×8×4=4KB/矩阵) |
| Block size | 16×16=256 | 匹配 BM/BN 划分,支持 2 blocks/SM |
⚠️ 注意:两次 __syncthreads() 是必须的——第一次确保数据加载完成后再计算,第二次确保计算完成后再覆盖 Shared Memory。
5. Thread 级 Tiling 优化:寄存器级数据复用
到这里,我们的优化形成了一条清晰的三级数据搬运链:
graph LR
A["Global Memory"] -->|"Block 协作加载 BM×BK / BK×BN"| B["Shared Memory"]
B -->|"Thread 独立加载 TM+TN 个 float"| C["Register"]
C -->|"TM×TN 次 FMA"| D["计算结果"]
每一级搬运都遵循相同原则:沿 K 维度迭代,每次搬运一小块,在当前存储层级上最大化复用后再搬运下一块。现在我们聚焦从 Shared Memory 到 Register 这一级。
5.1 问题:Shared Memory 仍是瓶颈
上一步的 kernel(Section 4.5)虽然已经让每个线程负责 (8 x 8) 个输出,但代码中对 As[row][p] 和 Bs[p][col] 的访问直接写在三层循环内部——编译器可能会优化,但从代码结构上看,每次 FMA 都伴随着对 Shared Memory 的隐式读取依赖。当 256 个线程同时高频访问 Shared Memory 时,会出现 MIO Throttle Stall。
解决思路:将”从 Shared Memory 读取”和”FMA 计算”显式分离——先批量读取到寄存器数组(a_frag、b_frag),再在寄存器上做外积。这样每次 p-Loop 迭代只需 次 Shared Memory 读取,就完成 次 FMA。
5.2 外积(Outer Product)分解
关键在于循环顺序。传统内积写法(K-先)导致 和 的元素无法复用:
// 内积:每个线程独立累加一个 C 元素 -> 复用率低
for k: sum += A[row][k] * B[k][col]
改为外积写法(K 在最外层):
// 外积:每个线程负责 TM×TN 个 C 元素
for k:
load A_frag[TM] from smem // 读一次 A 的 TM 个元素
load B_frag[TN] from smem // 读一次 B 的 TN 个元素
for i in TM:
for j in TN:
C_frag[i][j] += A_frag[i] * B_frag[j] // TM×TN 次 FMA
计算-访存比分析:每轮 K 迭代中,从 Shared Memory 读取 个 float(即 字节),完成 次 FMA(即 FLOPs)。则:
形式与 Section 4.3 完全一致——这并非巧合,而是因为外积本质上是把 Block 分块的思想下沉到了 Register 层级。同样由均值不等式可知:在 (寄存器占用近似项)固定时, 时计算访存比最大。
为什么取 TM = TN = 8\:
- 单线程寄存器占用:。 时为 个 float。
- 加上索引、循环变量等开销,单线程寄存器数约 90~120,刚好接近 SM 单线程寄存器上限(255)的 1/2,能保证 occupancy(每个 SM 至少驻留 2 个 Block)。
- 若取 ,则 就要占 256 个寄存器,会触发寄存器溢出(spill 到 Local Memory),反而劣化性能。
和内积写法的对比:内积每完成一次 FMA 都要从 Shared Memory 读 、 各一个 float,比值为 (按字节算)或 (按元素算)。外积取 时按元素算的比值为 ,提升 4 倍——这意味着原本 4 次 Shared Memory 访问才能驱动的计算,现在只需 1 次。
5.3 代码实现
template <int BM, int BN, int BK, int TM, int TN>
__global__ void sgemm_thread_tiling(const float* A, const float* B, float* C,
int M, int N, int K) {
__shared__ float As[BM][BK];
__shared__ float Bs[BK][BN];
// 每个线程在 C 中负责 TM×TN 的子块
const int thread_num = BM / TM * BN / TN; // = 256
int tid = threadIdx.x;
int thread_row = (tid / (BN / TN)) * TM;
int thread_col = (tid % (BN / TN)) * TN;
// 寄存器存储
float a_frag[TM];
float b_frag[TN];
float c_frag[TM][TN] = {0.0f};
int by = blockIdx.y, bx = blockIdx.x;
for (int bk = 0; bk < K; bk += BK) {
// 协作加载 A、B 到 Shared Memory(省略边界检查)
load_tile_A(A, As, by, bk, tid, M, K);
load_tile_B(B, Bs, bx, bk, tid, K, N);
__syncthreads();
// 外积累加
for (int k = 0; k < BK; k++) {
// 从 Shared Memory 加载到寄存器
for (int i = 0; i < TM; i++)
a_frag[i] = As[thread_row + i][k];
for (int j = 0; j < TN; j++)
b_frag[j] = Bs[k][thread_col + j];
// 寄存器上做外积
for (int i = 0; i < TM; i++)
for (int j = 0; j < TN; j++)
c_frag[i][j] += a_frag[i] * b_frag[j];
}
__syncthreads();
}
// 写回 Global Memory
for (int i = 0; i < TM; i++)
for (int j = 0; j < TN; j++)
C[(by * BM + thread_row + i) * N + bx * BN + thread_col + j] = c_frag[i][j];
}
5.4 寄存器预算
以 为例:
c_frag: 个寄存器a_frag+b_frag: 个寄存器- 索引、临时变量等:~30 个寄存器
- 合计:约 110-128 个寄存器/线程
V100 每个 SM 有 65536 个寄存器。128 寄存器/线程 × 256 线程/Block = 32768 寄存器/Block,每个 SM 可容纳 2 个 Block(512 线程 = 16 warps),occupancy = 25%。
💡 提示:25% 的 occupancy 看似很低,但 GEMM 有极高的指令级并行度(ILP),每个线程有 64 个独立的 FMA 链,足以隐藏流水线延迟。
6. Warp 级分块优化
6.1 动机
在线程分块的基础上,进一步考虑:一个 warp 的 32 个线程在 Shared Memory 上的访问模式如何最优化?
如果 warp 内线程排列为 (一行 32 个),那么读取 时 32 个线程都需要同一个元素(可以 Broadcast),但读取 时需要 32 个不同元素。反过来 则对 友好但 不友好。
6.2 Warp Tile 形状与计算访存比推导
假设 warp 在 M 方向有 个线程、N 方向有 个线程(),每个线程负责 的子块。在一次 p-Loop(K 方向一步)中:
- 利用 Shared Memory 广播,warp 实际从 tileA 读取 个不同元素(同一 M 位置的 个线程共享相同的 个值)
- 从 tileB 读取 个不同元素(同一 N 位置的 个线程共享相同的 个值)
- 每个线程计算 次 FMA,整个 warp 计算 FLOPs
Warp 级计算-访存比(令 ,此时分母 ):
比值与 成正比。在 约束下, 取最小值时比值最大。由均值不等式,。整数解中 ()和 ()是最优选择。
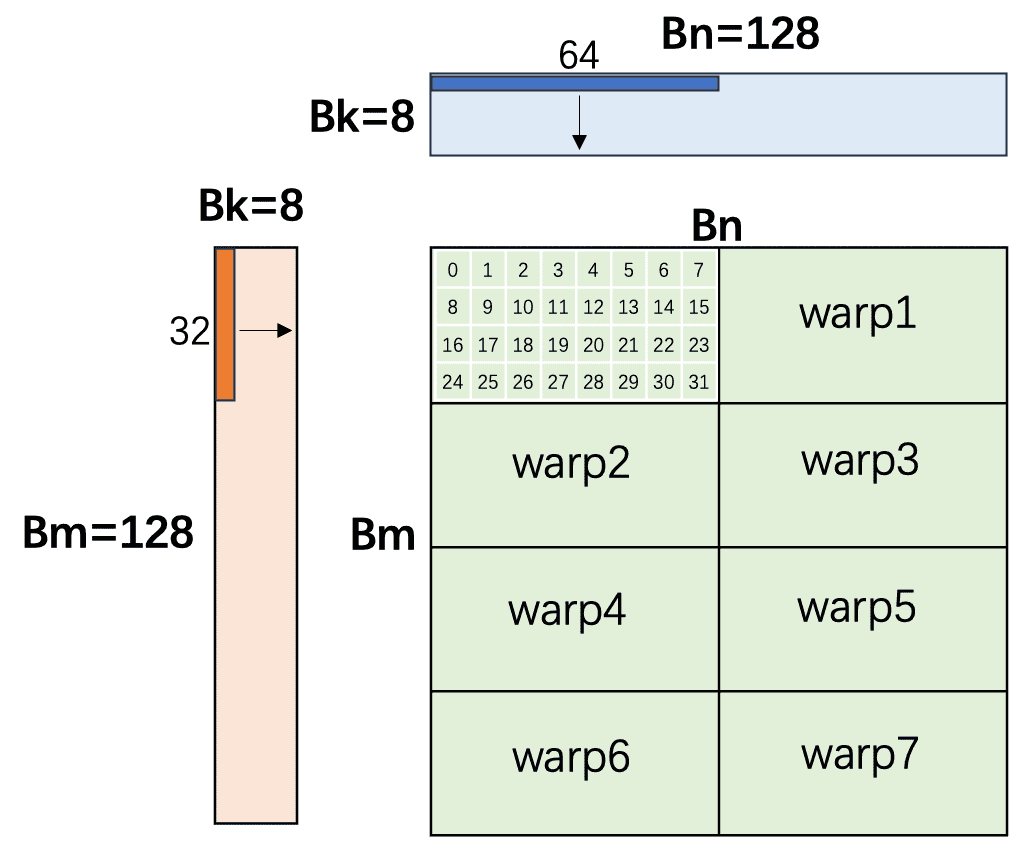
6.3 Warp 内线程位置计算
,一个 Block 有 256 / 32 = 8 个 warp。
取 warp 布局、:每个 warp 计算 的 C 子块。
确定了 的 warp 内布局后,需要精确计算每个线程在 Block Tile 中的起始坐标。设 tid 为线程在 Block 内的全局 ID:
int warp_id = tid >> 5; // tid / 32
int lane_id = tid & 31; // tid % 32
// warp 在 Block 中的位置(4×2 排列)
int warp_row = warp_id >> 1; // M 方向:0~3
int warp_col = warp_id & 1; // N 方向:0~1
// lane 在 warp 内的位置(4×8 排列,行主序)
int lane_row = lane_id >> 3; // M 方向:0~3
int lane_col = lane_id & 7; // N 方向:0~7
// 线程负责的 TM×TN 子块在 Block Tile 中的起始行列
int row_c = (warp_row * 4 + lane_row) * TM; // = (warp_row*4 + lane_row) * 8
int col_c = (warp_col * 8 + lane_col) * TN; // = (warp_col*8 + lane_col) * 8
以 tid = 18 为例:warp_id = 0, lane_id = 18, warp_row = 0, warp_col = 0, lane_row = 18 >> 3 = 2, lane_col = 18 & 7 = 2。该线程的起始坐标为 row_c = 16, col_c = 16,负责计算 Block Tile 中第 16~23 行、第 16~23 列的 子块。
7. 向量化访存:float4 优化
7.1 为什么需要向量化
从 Global Memory 加载数据到 Shared Memory 时,如果每次只搬运一个 float(32 bit),需要执行大量 LDG/STS 指令。GPU 的内存系统支持一次搬运 128 bit(即一个 float4),这能将指令数量减少为原来的 1/4,显著降低指令发射压力。
7.2 float4 加载宏
#define FLOAT4(ptr) (reinterpret_cast<float4*>(&(ptr))[0])
使用时:
// 一次加载 4 个连续 float
float4 tmp = FLOAT4(A[row * K + col]);
7.3 转置A存储策略
问题:矩阵 在 Global Memory 中按行存储,加载到 Shared Memory 后,内层循环需要按列读取(同一行的不同线程读 As 的同一列),无法使用 float4。
解决方案:将 在 Shared Memory 中转置存储,即 As[BK][BM] 代替 As[BM][BK]。这样原本的列访问变为行访问,可以使用 float4 一次读取 4 个连续元素。
// 从 Global Memory 加载 A 的一行(连续),转置存入 Shared Memory
float4 a_val = FLOAT4(A[global_row * K + bk + load_col]);
As[load_col + 0][local_row] = a_val.x;
As[load_col + 1][local_row] = a_val.y;
As[load_col + 2][local_row] = a_val.z;
As[load_col + 3][local_row] = a_val.w;
// 从 Shared Memory 读取时可以用 float4(连续地址)
float4 a_frag_vec = FLOAT4(As[k][thread_row]);
7.4 float4 引入后的坐标映射变化
使用 float4 读取后,每个线程负责的 8 个元素不再是间隔 C_BLOCK_Y 行的 8 个离散位置,而变为两组各 4 个连续元素(因为 float4 一次读取 4 个连续 float)。这改变了 Ct 结果写回矩阵 时的坐标计算。
未使用 float4 时:Ct 中第 行数据在 tileC 中的行坐标为 C_THREAD_Y + i * C_BLOCK_Y。
使用 float4 后:Ct 的 8 行分为两组(前 4 行连续,后 4 行连续),坐标变为:
tileC_row = 4 * C_THREAD_Y + (i / 4) * 4 * C_BLOCK_Y + (i % 4)
tileC_col = 4 * C_THREAD_X + (j / 4) * 4 * C_BLOCK_X + (j % 4)
写回代码相应修改:
for (int i = 0; i < Tm; i++) {
int r = r0 + 4 * C_THREAD_Y + (i / 4) * 4 * C_BLOCK_Y + (i % 4);
for (int j = 0; j < Tn; j++) {
int c = c0 + 4 * C_THREAD_X + (j / 4) * 4 * C_BLOCK_X + (j % 4);
if (r < M && c < N) C[r * N + c] = Ct[i][j];
}
}
7.5 性能提升
向量化访存的效果:
- 减少 75% 的 load/store 指令数量
- 降低 MIO Throttle stall
- 提高 Global Memory 到 Shared Memory 的有效带宽
- 实测通常带来 15%~30% 的性能提升
8. Bank Conflict 消除
8.1 什么是 Bank Conflict
Shared Memory 被划分为 32 个 bank,每个 bank 宽度 4 字节。地址映射规则:第 字节属于 bank 。
为什么是 32 个 bank? 这不是巧合——32 恰好等于一个 warp 中的线程数。硬件设计的意图是:在理想情况下,warp 的 32 个线程各访问不同的 bank,一个时钟周期内全部完成,达到峰值带宽。可以把每个 bank 想象成一条单车道:每个时钟周期只能通过一辆车(一次 4 字节访问)。32 条车道并行,恰好服务一个 warp 的 32 个线程。
当同一个 warp 内的多个线程同时访问同一个 bank 的不同地址时,这些访问必须串行化,形成 N-way Bank Conflict——相当于多辆车挤同一条车道排队通过,吞吐量降为 。
反之,如果多个线程访问同一 bank 的同一地址,硬件会进行广播(Broadcast):只需一次读取,结果分发给所有请求线程,不产生冲突。
⚠️ 注意:Bank conflict 只在 warp 内部定义。不同 warp 之间访问同一 bank 不存在 bank conflict——它们在时间上本就是分时调度的。
以 LDS.32(每线程取 1 个 float)为例的几种典型场景:
| 📊 场景 | ✅ 是否冲突 | 📝 原因 |
|---|---|---|
| 32 个线程各访问不同 bank | 无冲突 | 理想状态,1 次 transaction |
| 线程 0~31 访问不同 layer 的不同 bank | 无冲突 | bank 不同即可,layer 不影响 |
| 多线程访问同一 bank 的同一地址 | 无冲突 | 触发广播机制 |
| 2 个线程访问同一 bank 的不同地址 | 2-way 冲突 | 需串行 2 次 transaction |
8.2 float4 访存下的 Memory Transaction 机制
理解 float4 下的 bank conflict 需要先理解 Memory Transaction 拆分机制:
- float 访存(32 bit/线程):一个 warp 访问 128 bytes,恰好一个 memory transaction
- float2 访存(64 bit/线程):一个 warp 访问 256 bytes,拆分为 2 个 memory transaction,每组 16 个线程(half-warp)
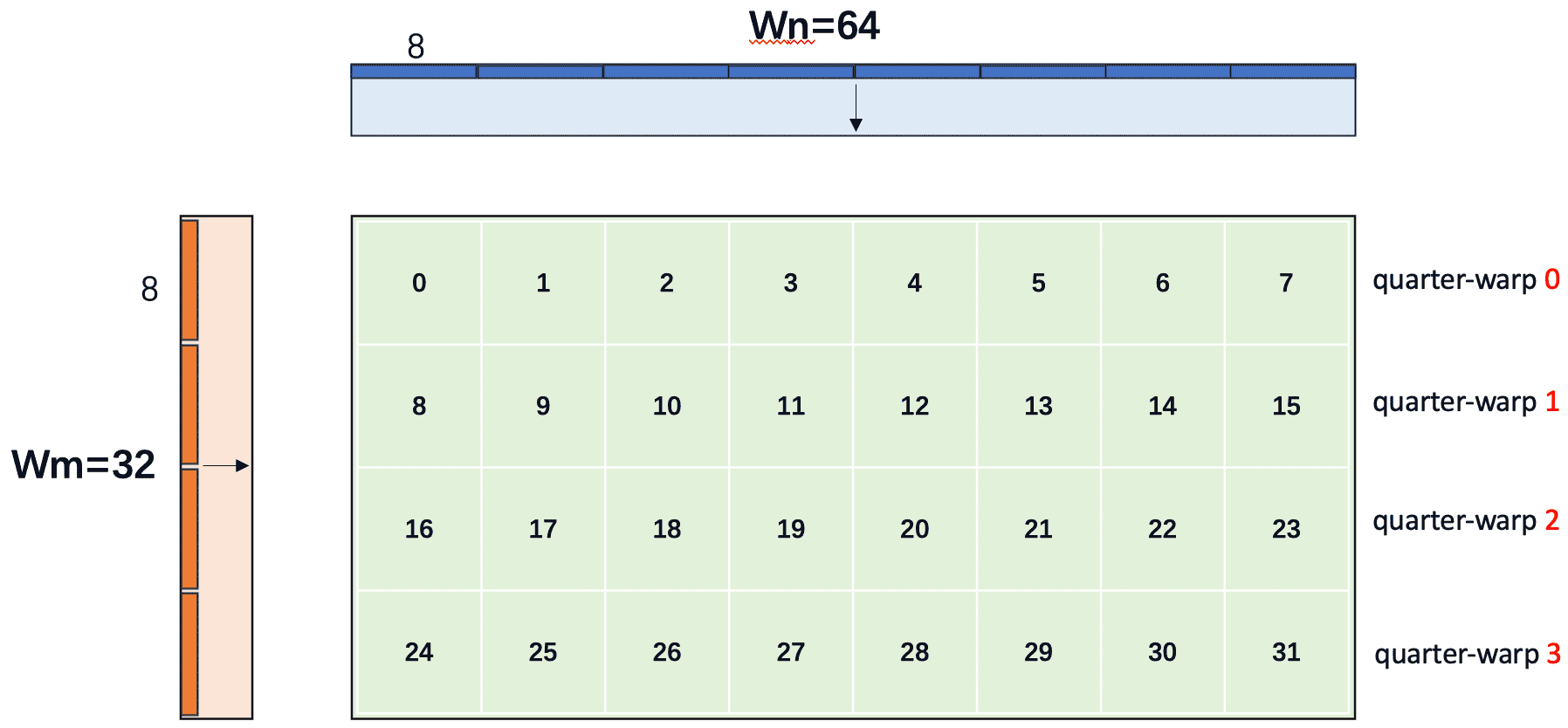
- float4 访存(128 bit/线程):一个 warp 访问 512 bytes,拆分为 4 个 memory transaction,每组 8 个线程(quarter-warp)
Bank conflict 是在单个 memory transaction 内部判定的,因此使用 float4 时只需关注 8 个线程(quarter-warp)之间的冲突。
广播(Broadcast)触发条件(float4 下):
当以下任一条件满足时,两个 quarter-warp 可以合并为一个 memory transaction:
- 条件 A:warp 内第 号线程与第 () 号线程访问相同地址(或其中一个不活跃)
- 条件 B:warp 内第 号线程与第 () 号线程访问相同地址(或其中一个不活跃)
8.3 Warp 形状对 Bank Conflict 的影响
不同的 warp 形状(线程在 M×N 方向上的排布)直接决定了从 Shared Memory 读取时是否会产生 bank conflict。我们以 的 warp 形状为反面教材来分析。
warp 读取 tileB 的冲突分析:
tileB 的形状为 ,按行存储时每 32 个 float 填满一层 bank。每个线程需要读取 个连续 float(使用 LDS.128 分两次读取 float4)。
在 排布下,第一个 quarter-warp(线程 0~7)中:
- 线程 0 读 bank 0~3 的 layer 0(B 的第 0~3 个元素)
- 线程 4 读 bank 0~3 的 layer 1(B 的第 32~35 个元素,偏移 个元素 = 1 个 bank layer)
线程 0 和线程 4 访问了相同 bank 的不同地址 → 2-way bank conflict!原本一个 quarter-warp 只需 1 次 transaction,现在变成了 2 次。
warp 读取 tileA 的冲突分析:
若 tileA 未转置,形状为 As[BM][BK] = ,每行 8 个元素,4 行填满一层 bank( 个元素)。线程需沿 M 方向读取 个值,这些值在内存中间隔 个 float(跨行),不连续,只能用 LDS.32 逐个取值。此时 bank conflict 在整个 warp 范围内判定。
线程 0(M 方向第 0 行)读 As[row][k],线程 16(M 方向第 1 行)读 As[row+8][k]。由于行间距为 8 个 float,8 行恰好跨越 2 层 bank( 个元素 = 2 层),两线程落在同一 bank 的不同 layer → 2-way bank conflict。
📌 关键点: 排布在 A 和 B 方向都存在 bank conflict,是最糟糕的情况之一。解决 A 方向冲突最直接的办法是转置存储(As[BK][BM]),让 M 方向的读取变为连续地址,可以使用 LDS.128 并在 quarter-warp 内触发广播。
排布配合 A 转置存储,在两个方向都能避免冲突。
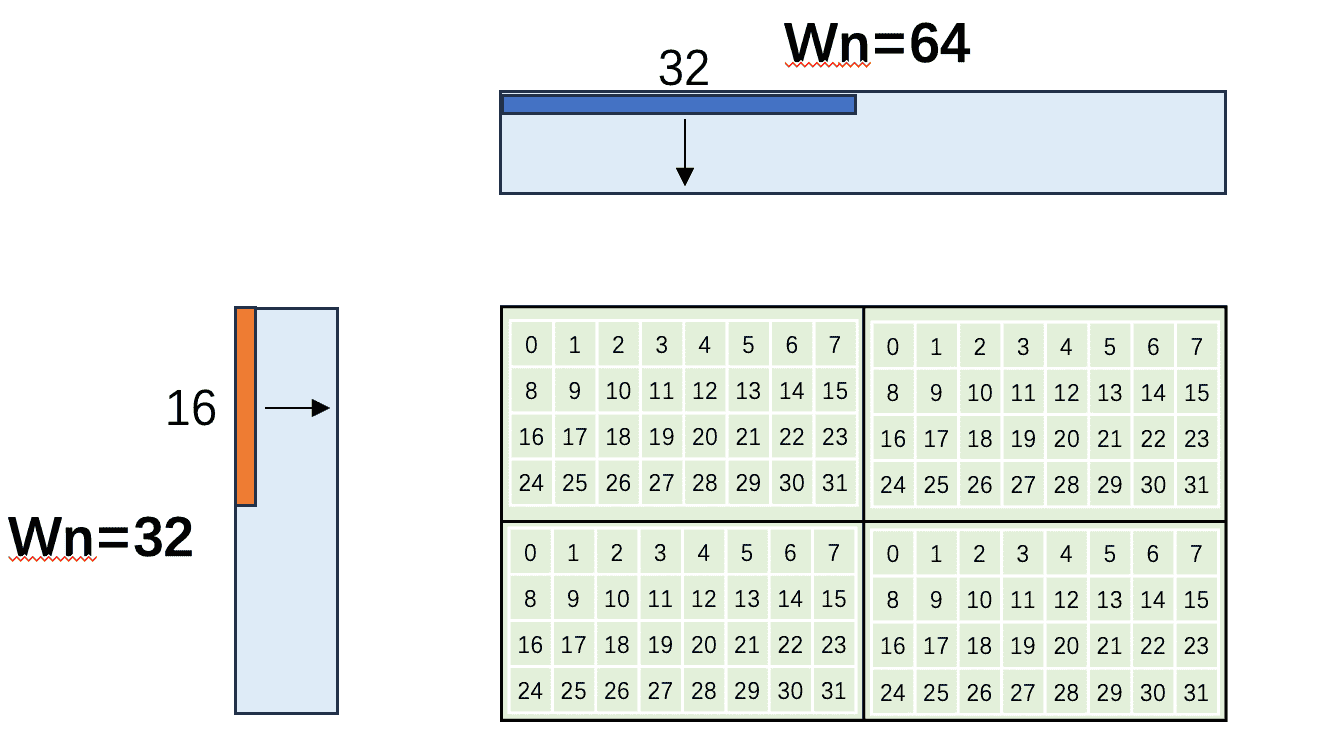
8.4 float4 下 warp(4x8) 的 Transaction 分析
warp 形状为 ,使用 float4 访问时,bank conflict 在 quarter-warp(8 个线程)内部判定。quarter-warp 在 N 方向被铺满,形状为 。下面分别分析两种 tile 的访问模式。
读取 tileA(转置存储 As[k][thread_row..thread_row+7]):
每个 lane 的起始 M 坐标为 lane_row * TM = lane_row * 8。quarter-warp 内 8 个 lane 的 lane_row 相同(都为 0)→ 8 个 lane 访问完全相同的 float4 地址。
quarter-warp 内有 1 个 unique float4,触发 8 路广播 → quarter-warp 内只需 1 个 transaction。
再检查跨 quarter-warp 的 uniform-access 合并条件(参见 §8.2):
- 条件 A:
lane i与lane i⊕1—— xor 1 只翻转 bit 0,落在lane_col上,lane_row不变 → 两者读取相同的 A 地址 → 全局满足条件 A ✅
→ LDS.128 触发 register packing,请求数从 4 降至 2 → 整个 warp 共 2 个 transactions。
📎 这与 NVIDIA 官方论坛的硬件描述一致:在 CC 7.0+ 上,uniform 访问可以让 LDS.128 的 requests/instruction 从 4 降至 2 (Greg @NV, 2018)。
读取 tileB(Bs[k][thread_col..thread_col+7]):
每个 lane 的起始 N 坐标为 lane_col * TN = lane_col * 8。quarter-warp 内 8 个 lane 的 lane_col = 0..7 各不相同:
| lane | 起始 N 坐标 | 读取的 B 元素 | 占用 banks |
|---|---|---|---|
| 0 | 0 | B[0:4] | 0~3 (layer 0) |
| 1 | 8 | B[8:12] | 8~11 (layer 0) |
| 2 | 16 | B[16:20] | 16~19 (layer 0) |
| 3 | 24 | B[24:28] | 24~27 (layer 0) |
| 4 | 32 | B[32:36] | 0~3 (layer 1) |
| 5 | 40 | B[40:44] | 8~11 (layer 1) |
| 6 | 48 | B[48:52] | 16~19 (layer 1) |
| 7 | 56 | B[56:60] | 24~27 (layer 1) |
quarter-warp 内有 8 个 unique float4,无广播。更糟的是,相邻 lane 之间 N 坐标相差 8 个 float(32 字节 = 8 个 bank),lane 0 起始于 bank 0,lane 4 起始于 bank 0 的下一层( floats = 1 bank layer)→ 2-way bank conflict。
→ 每个 quarter-warp 因 bank conflict 拆为 2 个 transactions → 整个 warp 共 8 个 transactions。
汇总:
| tile | quarter-warp 内 unique float4 数 | 广播 / 冲突 | warp 内 transaction 数 |
|---|---|---|---|
| tileA | 1 | 8 路广播 + condition A halving | 2 |
| tileB | 8 | 2-way bank conflict,无 halving | 8 |
| 合计 | 10 |
📌 观察:行主序排布下,tileA 受益于完美广播 + uniform-access halving(仅 2 个 transactions),但 tileB 在 N 方向跨度 = 引发 2-way bank conflict 且不满足 halving 条件,整体(10)仍劣于列主序(6 transactions)。这种一边过强、一边过弱的不对称正是 §8.5 方案三(Z-order 线程映射)要消除的——通过 形状的 quarter-warp,让 xor 1 / xor 2 的 lane 对同时在 tileA 上 row 相同、在 tileB 上 col 相同,两边都能合并 transaction 而不引入冲突。
8.5 解决方案
方案一:Padding(tileA转置存储)
在 Shared Memory 声明时额外加一列:
__shared__ float As[BK][BM + 4]; // 错开 bank 映射
缺点:破坏 float4 对齐,可能导致无法使用向量化读取。
方案二:XOR Swizzle(tileA转置存储)
通过异或运算打乱存储地址,使原本会冲突的访问分散到不同 bank:
// 写入时 swizzle
As[k][row ^ (k * 4)] = value;
// 读取时用相同规则反算地址
float val = As[k][target_row ^ (k * 4)];
优势:不增加额外空间,保持 float4 对齐。
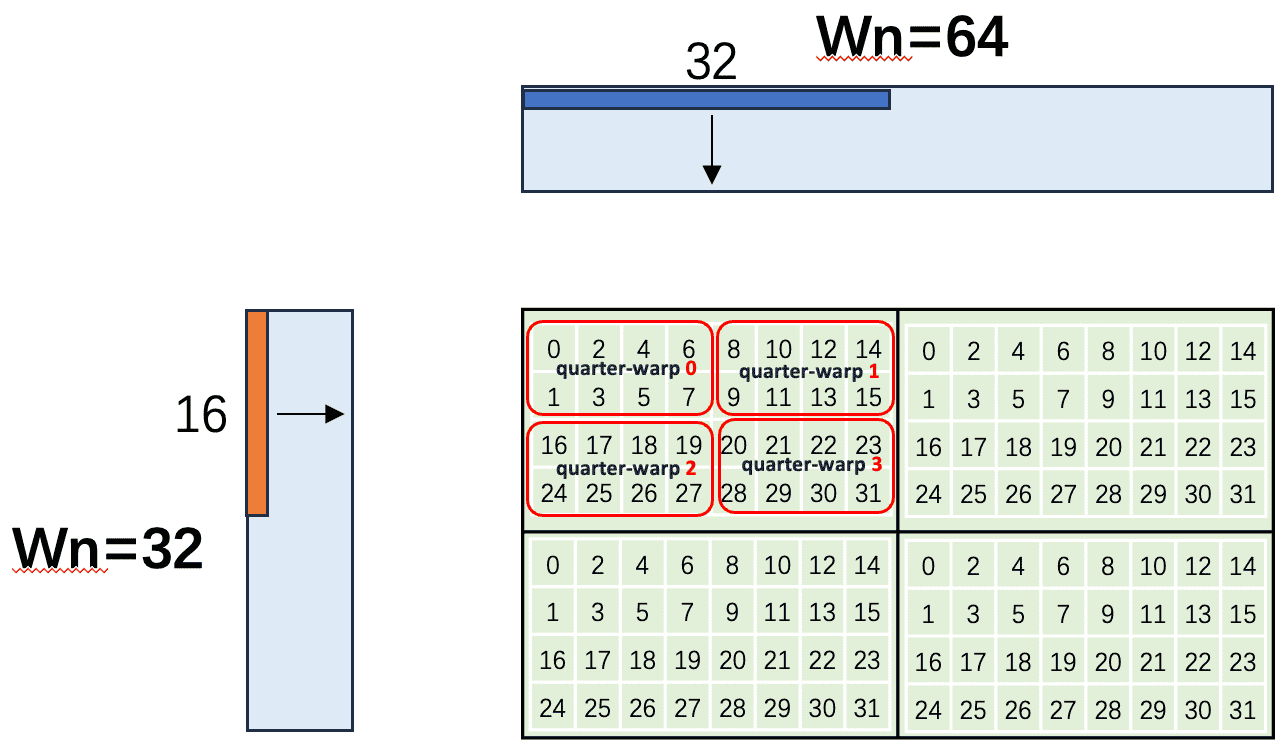
方案三: 计算区域拆分为 子块
另一种思路不改变 warp 形状,而是改变每个线程负责的计算区域布局。原本每个线程计算连续的 区域,改为拆分成 4 个 子块(分散在 tileC 中)。
核心原理:当每个线程读取 float4 时,同一 quarter-warp 内的 8 个线程恰好覆盖一整层 bank(连续 32 个 float = 8 × float4),不会出现跨 layer 的冲突。拆分的关键是让 quarter-warp 内的线程读取地址连续铺满一层 bank,而不是跳跃到不同层。
这种方法的优势是不需要修改线程-warp 映射逻辑,只需调整 C 矩阵的局部布局。代价是写回 Global Memory 时地址不连续,需要 scatter write。
QW 内 8 个 lane 共享同一行(lane_row=0),在 N 方向铺满 8 列。
读取 tileA(转置存储 As[k][row*4 .. row*4+3]):
每个 lane 读取起始 M 坐标为 lane_row * 4。QW 内 8 个 lane 的 lane_row 相同(都为 0)→ 8 个 lane 访问完全相同的 float4 地址,触发 8 路广播。
再检查跨 QW 的合并条件:
- 条件 A:
lane i与lane i⊕1(xor 1 翻转 bit 0,仅改变lane_col,lane_row不变)→ 两者读相同 A 地址 → 满足条件 A ✅
→ 4 个 QW 请求合并为 2 → 整个 warp 的 tileA 读取:2 个 transactions。
读取 tileB(Bs[k][col*4 .. col*4+3]):
每个 lane 读取起始 N 坐标为 lane_col * 4(而非基线的 lane_col * 8)。QW 内 8 个 lane 的起始地址与 bank 占用:
| lane | 起始 N 偏移 | 读取元素 | 占用 banks |
|---|---|---|---|
| 0 | 0 | B[0:4] | 0~3 (layer 0) |
| 1 | 4 | B[4:8] | 4~7 (layer 0) |
| 2 | 8 | B[8:12] | 8~11 (layer 0) |
| 3 | 12 | B[12:16] | 12~15 (layer 0) |
| 4 | 16 | B[16:20] | 16~19 (layer 0) |
| 5 | 20 | B[20:24] | 20~23 (layer 0) |
| 6 | 24 | B[24:28] | 24~27 (layer 0) |
| 7 | 28 | B[28:32] | 28~31 (layer 0) |
8 个 lane 的 float4 地址连续铺满 bank 0~31 的 layer 0,各 lane 占用不同 bank,无 bank conflict。
与基线(lane_col * 8 间距)的关键区别:基线中 lane 0 和 lane 4 的起始偏移差为 32 float = 1 个 bank layer,落入相同 bank 的不同地址导致 2-way 冲突。而方案四将间距从 8 缩小为 4,使 QW 内 8 个 lane 恰好铺满一整层 bank 而不溢出到下一层。
但检查跨 QW 的合并条件:
- 条件 A:
lane i与lane i⊕1(lane_col差 1)→ B 起始偏移差 4 → 不同地址 → 不满足 ❌ - 条件 B:
lane i与lane i⊕2(lane_col差 2)→ B 起始偏移差 8 → 不同地址 → 不满足 ❌
无法触发跨 QW 合并 → 每个 QW 独立 1 个 transaction → 整个 warp 的 tileB 读取:4 个 transactions。
每个子块一次 p-Loop 的 transaction 汇总:
| tile | QW 内冲突 | 跨 QW 合并 | warp 内 transaction 数 |
|---|---|---|---|
| tileA | 无(8 路广播) | 条件 A 合并 | 2 |
| tileB | 无(铺满一层 bank) | 不满足合并条件 | 4 |
| 合计 | 6 |
方案四:Z-order 线程映射
在方案三的基础上将 quarter-warp 的形状从默认的 (行主序)调整为 Z-order 排布,可以让 tileA 和 tileB 的读取都触发广播机制,将 memory transaction 从 10 个降至 4 个。
int lane_id = threadIdx.x % 32;
int lane_row = lane_id % 2 + (lane_id / 16) * 2; // 4 行
int lane_col = (lane_id % 16) / 2; // 8 列
按上面的映射展开,warp 内 32 个 lane 在 网格上的位置如下:
每个 quarter-warp 形状为 2 行 × 4 列。核心原理:QW 内 8 个 lane 仅覆盖 2 个不同的 lane_row 与 4 个不同的 lane_col,使 tileA 和 tileB 的读取都能在 QW 内触发广播;同时 xor 1 与 xor 2 分别保留 lane_col 与 lane_row 不变,正好对应跨 QW 合并的条件 A 与条件 B。
读取 tileA(转置存储 As[k][row*4 .. row*4+3]):
QW 内仅 2 个独立 A 地址,每个地址被 4 个 lane 共享(4 路广播),两地址落入不同 bank(0~3 vs 4~7),无 bank conflict。
再检查跨 QW 的合并条件:
- 条件 B:
lane i与lane i⊕2(xor 2 翻转 bit 1,仅改变lane_col,lane_row不变)→ 两者读相同 A 地址 → 满足条件 B ✅
→ 4 个 QW 请求合并为 2 → 整个 warp 的 tileA 读取:2 个 transactions。
读取 tileB(Bs[k][col*4 .. col*4+3]):
每个 lane 读取起始 N 坐标为 lane_col * 4。QW0 内 8 个 lane 的起始地址与 bank 占用:
| lane | (row, col) | 起始 N 偏移 | 占用 banks |
|---|---|---|---|
| 0 | (0, 0) | 0 | 0~3 (layer 0) |
| 1 | (1, 0) | 0 | 0~3 (layer 0) |
| 2 | (0, 1) | 4 | 4~7 (layer 0) |
| 3 | (1, 1) | 4 | 4~7 (layer 0) |
| 4 | (0, 2) | 8 | 8~11 (layer 0) |
| 5 | (1, 2) | 8 | 8~11 (layer 0) |
| 6 | (0, 3) | 12 | 12~15 (layer 0) |
| 7 | (1, 3) | 12 | 12~15 (layer 0) |
QW 内仅 4 个独立 B 地址,每个地址被 2 个 lane 共享(2 路广播),4 组地址铺满 bank 0~15 的 layer 0,无 bank conflict。
再检查跨 QW 的合并条件:
- 条件 A:
lane i与lane i⊕1(xor 1 翻转 bit 0,仅改变lane_row,lane_col不变)→ 两者读相同 B 地址 → 满足条件 A ✅
→ 4 个 QW 请求合并为 2 → 整个 warp 的 tileB 读取:2 个 transactions。
每个子块一次 p-Loop 的 transaction 汇总:
| tile | QW 内冲突 | 跨 QW 合并 | warp 内 transaction 数 |
|---|---|---|---|
| tileA | 无(4 路广播) | 条件 B 合并 | 2 |
| tileB | 无(2 路广播) | 条件 A 合并 | 2 |
| 合计 | 4 |
相比默认 排布(tileA 2 个 + tileB 8 个 = 10 个 transactions),Z-order 排布(各 2 个 = 4 个 transactions)减少了 60% 的 memory transactions。
9. 双缓冲与流水线
9.1 隐藏 Global Memory 延迟
前面的实现中,每次 K 循环迭代都要等待 Global → Shared Memory 的数据搬运完成后才能开始计算。Global Memory 访问延迟高达 300~500 个时钟周期,这段时间计算单元完全空闲。
双缓冲的思路类似乒乓球:准备两套 Shared Memory 缓冲区,一边用 Buffer 0 做计算,一边往 Buffer 1 加载下一轮数据。
9.2 p-Loop 级双缓冲(Shared → Register)
在 p-Loop(K 方向内层循环)中,每步需要:(1) 从 Shared Memory 读取 regA/regB;(2) 计算 regA × regB 的外积。串行执行时,计算必须等待 Shared Memory 读取完成(20-30 cycle 延迟)。
使用双缓冲寄存器,将读取和计算重叠:
float regA[2][Tm], regB[2][Tn];
#pragma unroll
for (int p = 0; p < BK + 1; p++) {
// 计算阶段:使用上一步读取的数据
if (p > 0) {
for (int i = 0; i < Tm; i++)
for (int j = 0; j < Tn; j++)
Ct[i][j] += regA[(p - 1) & 1][i] * regB[(p - 1) & 1][j];
}
// 预取阶段:读取本步数据到另一组寄存器
if (p < BK) {
for (int i = 0; i < Tm / 4; i++)
FLOAT4(regA[p & 1][i * 4]) = FLOAT4(As[p][...]);
for (int j = 0; j < Tn / 4; j++)
FLOAT4(regB[p & 1][j * 4]) = FLOAT4(Bs[p][...]);
}
}
由于计算阶段(FFMA 指令)和预取阶段(LDS 指令)分属不同的 GPU 执行单元,硬件可以并行调度两者,实现 Shared Memory 延迟的隐藏。
9.3 K-Loop 级双缓冲(Global → Shared)
第一级:Global → Shared 双缓冲
__shared__ float As[2][BK][BM]; // 两个 buffer
__shared__ float Bs[2][BK][BN];
第二级:Shared → Register 双缓冲
float a_frag[2][TM]; // 两组寄存器
float b_frag[2][TN];
9.4 流水线编排
流水线的关键是指令排布顺序。在主循环的每次迭代中:
┌──────────────────────────────────────────────┐
│ 1. 发射 LDG 指令(加载下一轮数据到寄存器暂存) │
│ 2. 执行 FFMA 计算(使用当前 buffer 的数据) │
│ 3. 执行 STS 指令(将暂存寄存器写入另一 buffer) │
│ 4. __syncthreads() 切换 buffer │
└──────────────────────────────────────────────┘
📌 关键点:先发射 LDG 再做计算是关键——LDG 是异步的,发射后线程继续执行后续 FFMA 指令,当 FFMA 执行完毕时 LDG 数据通常已经就绪。这样 300+ cycle 的 Global Memory 延迟被 FFMA 计算完美隐藏。
9.5 代码框架
template <int BM, int BN, int BK, int TM, int TN>
__global__ void sgemm_double_buffer(const float* A, const float* B, float* C,
int M, int N, int K) {
__shared__ float As[2][BK][BM];
__shared__ float Bs[2][BK][BN];
float a_frag[2][TM], b_frag[2][TN];
float c_frag[TM][TN] = {0.0f};
float ldg_a[4], ldg_b[4]; // 暂存 Global Memory 加载结果
int buf_idx = 0;
// Prologue: 加载第一个 tile
load_global_to_shared(A, B, As[0], Bs[0], /*tile_k=*/0);
__syncthreads();
// 预取第一组寄存器数据
load_shared_to_reg(As[0], Bs[0], a_frag[0], b_frag[0], /*k=*/0);
for (int tile_k = BK; tile_k < K + BK; tile_k += BK) {
int next_buf = 1 - buf_idx;
#pragma unroll
for (int k = 0; k < BK; k++) {
// 预取下一个 k 步的寄存器数据
if (k + 1 < BK) {
load_shared_to_reg(As[buf_idx], Bs[buf_idx],
a_frag[1 - k % 2], b_frag[1 - k % 2], k + 1);
}
// 在第一个 k 步时,发射下一 tile 的 Global Memory 加载
if (k == 0 && tile_k < K) {
issue_ldg(A, B, ldg_a, ldg_b, tile_k);
}
// 执行 TM×TN 的外积计算
outer_product(a_frag[k % 2], b_frag[k % 2], c_frag);
}
// 将 LDG 结果写入下一 buffer
if (tile_k < K) {
store_reg_to_shared(ldg_a, ldg_b, As[next_buf], Bs[next_buf]);
}
__syncthreads();
buf_idx = next_buf;
load_shared_to_reg(As[buf_idx], Bs[buf_idx], a_frag[0], b_frag[0], 0);
}
// 写回结果
store_c(c_frag, C);
}
9.6 同步优化
双缓冲的一个重要好处:主循环中只需要一次 __syncthreads()(在 buffer 切换时),而非两次。这减少了同步开销。
10. Ampere 异步拷贝流水线
10.1 cp.async 指令
从 SM80(Ampere)开始,NVIDIA 引入了 cp.async 指令,支持从 Global Memory 到 Shared Memory 的异步直接拷贝,无需经过寄存器中转:
cp.async.cg.shared.global [smem_ptr], [gmem_ptr], 16;
好处:
- 节省用于中转的寄存器(约 8 个/线程)
- 硬件流水线更深,延迟隐藏效果更好
- 支持多级流水线(3-4 stages)
10.2 Pipeline 同步模型
// 提交一组异步拷贝
cp.async.commit_group;
// 等待最多还有 N 组未完成
cp.async.wait_group N;
__syncthreads();
通过控制 wait_group 的参数 ,可以实现多级流水线:加载 stage 的数据,同时计算 stage 的数据。
10.3 C++ API
CUDA 11+ 提供了更高层的 C++ 抽象:
#include <cuda/pipeline>
#include <cooperative_groups.h>
auto group = cooperative_groups::this_thread_block();
__shared__ cuda::pipeline_shared_state<cuda::thread_scope_block, 2> pipe_state;
auto pipe = cuda::make_pipeline(group, &pipe_state);
// 发射异步拷贝
pipe.producer_acquire();
cuda::memcpy_async(group, smem_ptr, gmem_ptr, sizeof(float) * BK * BM, pipe);
pipe.producer_commit();
// 等待数据就绪
pipe.consumer_wait();
// ... 计算 ...
pipe.consumer_release();
10.4 CUTLASS 多级流水线
CUTLASS 库在 Ampere 架构上默认使用 3~4 级 Shared Memory buffer:
graph LR
S0["Stage 0: 计算中"] --> S1["Stage 1: 数据就绪"]
S1 --> S2["Stage 2: 加载中"]
S2 --> S3["Stage 3: 发射 LDG"]
更多 stage 能隐藏更长的延迟,但也消耗更多 Shared Memory。3 stage 在大多数场景下是最佳平衡点。
10.5 Hopper(SM90):TMA 与 WGMMA
更新一代的 Hopper 架构引入了:
- TMA(Tensor Memory Accelerator):专用硬件单元处理多维张量的地址计算和搬运
- wgmma.async:Warp Group 级别的异步矩阵乘指令,直接操作 Shared Memory
这些特性进一步解耦了数据搬运和计算,是 GEMM 优化的未来方向。
11. SASS 级优化与寄存器调度
11.1 寄存器 Bank Conflict
GPU 的寄存器文件也有 bank 结构,所有架构均为 4 个 bank,映射规则为 reg_id % 4 = bank_id。
当一条 FFMA 指令的 3 个源操作数(, , )中任意两个落在同一 bank 时,就会产生寄存器 bank conflict,浪费 1 个周期。
11.2 Register Reuse Cache
从 Maxwell 开始,硬件引入了 Register Reuse Cache。当 SASS 指令的操作数被标记 .reuse 标志时,该寄存器值被缓存在一个小型 buffer 中,下一条指令可以直接从 cache 读取而不走寄存器文件,避免 bank conflict。
编译器(nvcc)的自动 reuse 标记率通常在 20% 左右,而手动优化的 SASS 代码可以达到 49%+,性能差距可达 5%~10%。
11.3 寄存器重映射
通过精心安排 c_frag 各元素对应的物理寄存器编号,使得连续 FFMA 指令的操作数尽量落在不同 bank:
// 目标:FFMA R_c, R_a, R_b, R_c
// 确保 R_a, R_b, R_c 的 bank 两两不同
// 策略:按照 c_frag 的访问顺序分配寄存器号
这需要在 SASS 层面手动调整,使用工具如 CuAssembler、maxas 等。
11.4 指令交错
将 FFMA 指令与 LDS(Shared Memory Load)指令交错排列,利用 FFMA 的计算延迟来隐藏 LDS 的访存延迟:
LDS R0, [R_addr] // 发射 smem 读取,20-30 cycle 延迟
FFMA R10, R4, R5, R10 // 利用等待时间做计算(需要足够多独立 FFMA)
FFMA R11, R4, R6, R11
FFMA R12, R4, R7, R12
FFMA R13, R4, R8, R13
... // 实际需要 ~20 条独立 FFMA 才能完全隐藏 LDS 延迟
FFMA R28, R2, R9, R28
// R0 此时已就绪
FFMA R14, R0, R5, R14 // 使用 LDS 结果
12. 实战参数选择与调优指南
12.1 推荐参数表
| 📊 参数 | ✅ 推荐值 | 📝 说明 |
|---|---|---|
| BM | 128 | 过小则算术强度不足,过大则 Shared Memory 放不下 |
| BN | 128 | 同上 |
| BK | 8 | 影响 Shared Memory 用量和加载指令数 |
| TM | 8 | 每线程负责 8 行,寄存器可承受 |
| TN | 8 | 每线程负责 8 列 |
| Block Size | 256 | = (128/8) × (128/8) = 16×16 |
| Warp 形状 | 4×8 | 平衡 A/B 的访问效率 |
| Registers/Thread | 120-128 | 用 __launch_bounds__ 控制 |
| Shared Mem/Block | 16-32 KB | 含双缓冲 |
12.2 优化级别与预期性能
| 📊 优化阶段 | ⚡ 相对 cuBLAS 性能 | 📝 核心改进 |
|---|---|---|
| Naive | 6%~11% | 无优化基线 |
| Shared Memory Tiling | 25%~40% | 数据复用 |
| Thread Tiling(寄存器外积) | 50%~65% | 减少 smem 访问 |
| Vectorized Load(float4) | 60%~75% | 减少指令数 |
| Bank Conflict 消除 | 70%~80% | 提高 smem 吞吐 |
| Warp Tiling | 80%~87% | 优化 warp 内访问 |
| Double Buffering | 90%~97% | 隐藏延迟 |
| SASS 手调 | 95%~99% | 寄存器调度 |
12.3 调优工具
- Nsight Compute:分析 warp stall 原因
Stall Long Scoreboard:Global Memory 延迟未隐藏Stall MIO Throttle:Shared Memory 指令压力过大Stall Short Scoreboard:Shared Memory 延迟Stall Barrier:同步等待
- cuobjdump / nvdisasm:查看编译后的 SASS 指令
- Occupancy Calculator:评估资源使用与占用率
12.4 写法优化:被忽视的性能杀手
看似等价的代码写法在 SASS 层面可能产生巨大差异。参考实现中,仅靠写法优化就能把性能从 ~60% 提升到 ~93% cuBLAS:
位运算替代除法取模
整数除法和取模在 GPU 上编译为多条指令序列(特别是除数非 2 的幂时)。替换为位运算可以节省大量指令 slot:
// ❌ 慢:编译器生成 IMAD + SHR + ... 序列
int row = threadIdx.x / BN_TILE;
int col = threadIdx.x % BN_TILE;
// ✅ 快:单条指令(BN_TILE 为 2 的幂时)
int row = threadIdx.x >> 3; // BN_TILE = 8
int col = threadIdx.x & 7;
#pragma unroll 陷阱
编译器展开循环时要求能在编译期确定循环次数(trip count)。如果循环起始值来自运行时变量,nvcc 往往无法推断出 trip count 是常量,#pragma unroll 会静默失效:
// ❌ 不会展开:start 来自运行时计算
int start = threadIdx.x * TM;
#pragma unroll
for (int i = start; i < start + TM; i++) { ... }
// ✅ 正确展开:循环变量从 0 开始
#pragma unroll
for (int i = 0; i < TM; i++) {
int idx = threadIdx.x * TM + i;
...
}
消除冗余循环
当内循环只迭代一次时(如 BK/float4_size = 8/4 = 2 或 = 1),手动展开可以消除循环开销和可能的寄存器溢出:
// ❌ 循环只执行 1 次,但编译器可能保留循环结构
for (int k = 0; k < BK / 4; k++) {
tileA[...] = ldg_ptr[k];
}
// ✅ 直接展开
tileA[...] = ldg_ptr[0]; // BK=8, float4 load, 只需 2 次
tileA[...] = ldg_ptr[1];
模板参数实现常量折叠
将分块参数作为 template 参数传入,编译器可以在编译期计算所有依赖值,消除运行时计算:
template <int BM, int BN, int BK, int TM, int TN>
__global__ void sgemm_kernel(float* A, float* B, float* C, int M, int N, int K) {
// BM/TM, BN/TN 等在编译期求值
constexpr int THREAD_X = BN / TN;
constexpr int THREAD_Y = BM / TM;
...
}
📌 关键点:这些写法优化的本质是减少非计算指令(整数运算、分支、地址计算)对指令流水线的占用,让更多 slot 留给 FFMA。
12.5 常见陷阱
❌ 不推荐做法:
- 追求高 occupancy:GEMM 靠 ILP 而非 TLP,25% occupancy 通常足够
- 使用
#pragma unroll但循环变量不从 0 开始:编译器无法展开 - Block 数量少于 SM 数量:GPU 利用率不足
- 忽略 K 不整除 BK 的边界处理
✅ 推荐做法:
- 用位运算代替除法取模:
x / 8→x >> 3,x % 8→x & 7 - 使用
-maxrregcount=128或__launch_bounds__(256, 2)限制寄存器 - 先跑 Nsight Compute 定位瓶颈再针对性优化
- 对不同矩阵尺寸做 auto-tuning
📝 总结
CUDA GEMM 优化是一个从应用层到硬件微架构的全栈工程。核心方法论可以归结为:
- 提升算术强度:通过分块(Block Tile → Thread Tile → Warp Tile)逐层提高数据复用率
- 隐藏访存延迟:通过双缓冲/流水线让计算与数据搬运重叠执行
- 最大化带宽利用:向量化访存、消除 Bank Conflict、利用 Broadcast
- 精细指令调度:寄存器分配、指令交错、Reuse Cache
每一层优化都在”搬运”与”计算”的竞赛中为计算争取更多优势。理解了这套方法论,你不仅能写出高效的 GEMM kernel,也能将相同的思维迁移到其他访存密集型 CUDA 算子的优化中。
🎯 自我检验清单
- 能解释 GEMM 分块后算术强度从 0.25 提升到 32 FLOPs/Byte 的推导过程
- 能说出朴素实现、Shared Memory 分块、线程分块各自的性能瓶颈
- 能独立实现一个包含 Shared Memory Tiling + Thread Tiling 的 SGEMM kernel
- 能解释外积(Outer Product)相比内积为何能提高 Shared Memory 复用率
- 能画出双缓冲流水线中 LDG / FFMA / STS 的时序重叠关系
- 能使用 Nsight Compute 识别 Stall Long Scoreboard vs MIO Throttle 的含义
- 能解释 Shared Memory Bank Conflict 的产生条件和 3 种解决方案
- 能说明为什么 4×8 的 Warp 形状优于 1×32
- 能计算给定 TM/TN/BM/BN 参数下的寄存器用量和 occupancy
- 能解释 cp.async 相比传统 LDG+STS 的优势
📚 参考资料
- CUTLASS: CUDA Templates for Linear Algebra Subroutines
- Optimizing-SGEMM-on-NVIDIA-Turing-GPUs (yzhaiustc)
- Hands-on-GEMM (AyakaGEMM)
- NVIDIA CUDA C++ Programming Guide - Shared Memory
- maxas - Open Source Maxwell Assembler
- How to Optimize a CUDA Matmul Kernel for cuBLAS-like Performance (Simon Boehm)
- CUDA Matrix Multiply Optimization - Lei Mao’s Blog
- CuAssembler - CUDA Assembler
- NVIDIA Nsight Compute Documentation
- Volta Architecture and Performance Optimization (GTC 2018)
- NVIDIA Forum: How to understand the bank conflict of shared memory — Robert Crovella 解释 LDS.128 的 4-transaction 拆分规则
- NVIDIA Forum: Unexpected shared memory bank conflict — Greg @NV 解释 SM 7.0+ uniform-access 让 LDS.128 请求数从 4 降至 2 的机制
- 官方 CUTLASS: Fast Linear Algebra in CUDA C++
- NervanaSystems-SGEMM优化